
这个夏天,自主泊车方案在自动驾驶领域异常火热,作为L4级别自动驾驶方案中的一个分支,自主泊车方案一方面整合了L4级别自动驾驶的技术,另一面由于场地的特殊性让其商业落地成为现实。
入秋前一天,智行者发布自主代客泊车(AVP)方案。
这是继纽劢科技、百度、Momenta之后今年第四家发布自主代客泊车方案的科技公司。
相比其他三家不同,智行者自主代客泊车方案主要强调基于增强视觉标签的AVP解决方案,该方案结合低成本车规级硬件方案与轻量级场端改造。
智行者采用的增强视觉标签式AVP解决方案在车端配置了4个环视相机、1个前视相机、12个超声波雷达和4个毫米波雷达。
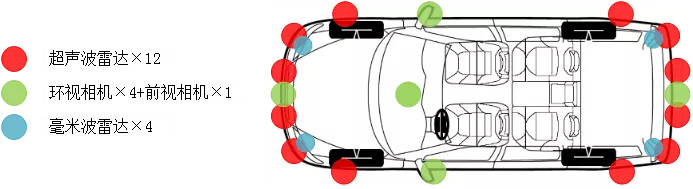
对于传感器硬件来说,这些都是可量产的传感器组合,价格可控制在千元级别,其中某些具备L2级别的自动驾驶汽车已实现部分硬件标配(包括10万元级别的国产车型)。
据介绍,智行者提出的AVP解决方案基于增强型视觉标签进行车辆的全局路段规划、高精度定位、局部路径引导以及特殊路段语义信息标注,通过增强标签及云端调度进行轻量级场地升级,模拟出一套适用于任意停车场的完备交通系统。
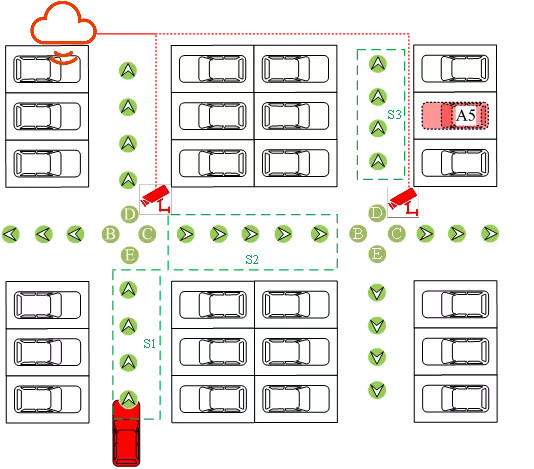
其中,增强视觉标签式AVP解决方案由云端进行全局路段规划,规划路段可表示为S1-S2-S3(A5)(见上图)将增强标签直接作为表述协议,使用这种方式可以简单准确地进行全局路段表述。
同时,通过标签拓扑关系及检测到的标签信息,车辆能够时刻定位当前所在的全局位置。
该方案所使用的局部路径规划技术利用了增强型视觉标签的组合,将连续标签的组合视为用于定位导航的虚拟车道中心线,车辆根据虚拟车道中心线进行局部路径规划。
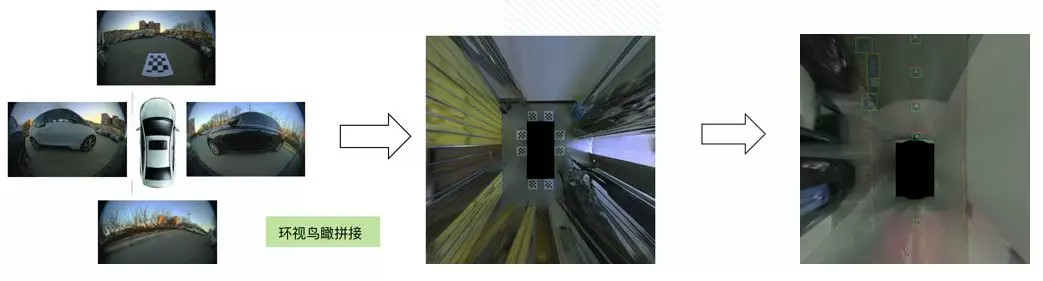
增强视觉标签式AVP解决方案使用基于鱼眼环视相机,拼接生成鸟瞰图像,利用基于深度学习的计算机视觉方法,实现对标签的实时精准检测和定位,对外部环境如光线强度等鲁棒性较强,目前在各种干扰条件下可以达到精确检测标签类型超过20个,其中包括导航信息标签及语义信息标签等。
在计算基础平台层面,智行者计算基础平台分为ECU层、操作系统层和中间件层,ECU层包括高性能平台和安全平台。
前者强调计算性能,后者强调安全性。
针对前者,采用POSIX OS和Adaptive AUTOSAR发挥多核性能、保证灵活性。
针对后者,采用OSEK OS和Classic AUTOSAR保障安全,自动驾驶系统层实行软件与算法分离设计。通过可视化配置,可以轻松将基础组件(算法)进行组合(架构),快速形成产品。
可以说,低成本车规级硬件方案搭配轻量级场端改造,智行者推出的这项增强视觉标签式AVP解决方案在保障安全第一性的基础上,以量产级与商业化为重要优势,真正做到了兼顾智能车辆环境适应能力与改造成本这两个重要的评价指标。
增强视觉标签式AVP的主要优势包括以下五个方面:
1、完备性:所使用的增强标签系统能够模拟车道线、交通标志及红绿灯信息,形成完备的交通系统,实现泊车过程中跟随、让行、避让、车位检测及泊车功能;
2、轻量级:无需对场地地面实体进行改造,不需要安装激光雷达、UWB等昂贵的非量产设备,预计改造成本1000元/万平米,真正做到了降低改造成本和量产阻力,方案可适用于露天、地下及多层停车场等基本停车场场景,场地适应性强;
3、量产级:复用车载环视相机、毫米波雷达及超声波雷达,硬件成本低,对车身外观无需特殊要求;
4、标准化:可以全方位监控车辆状态,对接至客户已有云端系统,实现监控数据全透明化,并且可以根据客户需求定制手机APP、云端管理系统;
5、商业化:无需进行场端实体改造,场端改造成本低,场地标签作业流程快速高效,每天可完成1万平米场地作业,无需高精度地图采集和日常维护,运营维护成本低。
为了完整展示智行者自主泊车功能方案,这次智行者公布了一段实拍自主泊车视频。
从视频来看,智行者通过对一辆北汽新能源ARCFOX的首款微型电动车LITE进行改装,使用者在停车场入口通过手机APP选择自主泊车功能,同时,结合远程监控和调度平台该车会进入自主驾驶状态,值得注意的是远程监控和调度平台是智行者自主泊车方案中特有的云端后台调度系统,这一系统是完全由智行者自主实现,可同时实现上百台车辆的整体调度。
进入停车场后,智驾君发现与其他家在场端自建高精度地图不同的是,智行者通过视觉增强标签系统的方式引导车辆自主行驶,方案中配合视觉增强标签系统使用,为智能车辆下发场地配置信息与目标车位信息,提高车辆寻路、找车位的效率,同时可以进行多车调度,提高了整体泊车效率,这样做的好处是无需场端激光雷达改造和视觉建图。
在这一方案中配合视觉增强标签系统使用,为智能车辆下发场地配置信息与目标车位信息,提高车辆寻路、找车位的效率,同时可以进行多车调度,提高了整体泊车效率
在停车场中,智行者团队对该车设计了两种常见场景:行人穿行、车辆自主避让。
当有人从车辆一段快速出现时,该车成功完成自主刹车功能,当人离开车辆正前方,车辆继续前行。

当车辆驶出车位时,如遇到前方有正在驶过的车辆,该车会自动停车等待,当车辆完全驶过,该车辆继续行驶。
有人从车辆一段快速出现时,该车成功完成自主刹车功能,当人离开车辆正前方,车辆继续前行。

根据对外公布的视频来看,智行者自主泊车方案中的车辆行驶较为平稳,在行驶过程中偶遇行人、车辆判断障碍物准确,在转弯是,车辆方向盘转动规律平稳。
据介绍,智行者公司内部组织独立团队投入AVP的研发已有一年时间,现阶段该低成本量产级方案已达到设计指标要求,希望下一步合作伙伴一起推动该方案的快速落地,最快的商业预计在2020年左右。
从智行者发布的方案来看,相比国内之前发布的自主代客泊车方案,智行者自主代客泊车(AVP)方案主要优势在于我们结合了车端改造与场端改造的优势,使用轻量级场端改造,配合云端后台调度,不引入激光雷达、UWB等昂贵传感器。
同时在车端使用低成本车规级硬件方案,提高智能车辆环境适应能力,在环境适应能力与改造成本的平衡中取最优值,无需高精度地图,后期运营和维护成本低。
智行者联合创始人/技术研发部高级副总监张放表示,“视觉增强标签系统是我们这一方案的特色,从想法提出到实施完全由我们团队自主完成,我们不使用高精度地图的原因主要是,地图的采集与场端变化所造成的日常维护相对来说成本比较昂贵,并且在进行高精度地图匹配时,如果使用如果采用激光雷达传感器,那么会大大提高成本,如果采用摄像头传感器,那么会比较依赖外界光线条件。我们的视觉增强标签系统的定位精度是在厘米级的,相对于高精度地图的方案在成本和使用效果方面都有相当的优势。这一方案如果说弊端的话,就是在标签张贴上需要与停车场进行协调,与系统所带来的方便快捷相比,可以说是几乎没有什么推广压力了。"
目前,行业普遍认可的自动驾驶商业落地需要从4个维度进行考量:封闭场景/开放场景、固定路线/自由路线、低速/高速、车内有乘客/车内无乘客。
如果对这4个维度的8项条件进行整合,可以发现自主泊车将是L4级别自动驾驶中最先实现商用化的一项功能。
目前,国内外互联网科技巨头、传统车企和创业公司纷纷投身汽车智能化变革,提出了多种自动化驾驶解决方案实现自主代客泊车,可大致分为以下两类:
以场端改造为主的技术方案:该方案将激光雷达、UWB等传感器安装在停车场,车辆仅需具备电子制动、自动换挡、电子助力转向及远程互联功能即可。但由于其场端改造的建设和维护成本较高,目前仅有一些示范性演示,难以大规模推广。
以车端改造为主的技术方案:该方案主要利用车载视觉或激光雷达等传感器用于高精度建图、定位和障碍物检测。其不足之处为:依赖高精度地图,需要专业地图供应商介入,采集和更新地图成本高,短期内商务及运营压力大。
2018年11月12日,搭载驭势AVP自动代客泊车(自主泊车)系统的宝骏E200-智能泊车产品首先落地,并面向终端消费者落地交付。
行业预测到2023年,自动泊车系统的普及率会超过20%。
不过,另一面,就地下停车场而言处在非公共交通管理区域内,一旦无人的自主泊车车辆发生交通事故其事故责任很难鉴定。
最后,总结一下目前市场主流科技公司的自主泊车方案:
百度
传感器配置:未透露
是否场端改造:否
商业时间:2020年。
智驾点评:作为智能驾驶时代的技术创新产物,百度Apollo Valet Parking自主泊车方案利用百度独有的车云图厂一体解决方案以及云和高精地图优势,实现了智能泊车场端改造的最佳性价比,车端百度通过车规级传感器可以实现车辆的中、近环境感知、轨迹规划和车辆控制,加之百度云和百度的数据积累经验及大数据分析能力,百度高精地图在国内多家OEM测试通过率100%,相对精度为0.1 ~ 0.2米,冗余率/遗漏率仅为0.01%,从而实现自主泊车巡航精度和高安全。,与此同时,基于高精地图和视觉AI,自主泊车可以保障10cm精度定位和巡航。
驭势科技
传感器配置:环视摄像头+前后视摄像头+超声波雷达
是否场端改造:否
商业时间:2018年11月
智驾点评:作为自主泊车功能最早实现商用的科技公司,驭势科技除了自身技术过硬之外,很重要的一点在于通过运营运维服务平台实现端到端仿真系统、人机交互系统和数据管理平台等几大模块实现对车上传感器数据的采集、存储、传输及分析流程自动化,不断优化无人驾驶算法、系统安全性及用户体验,对系统组件做实时和预测性的运维,支持无人驾驶应用的运营和管理,同时远程监控系统可以进一步增强系统在复杂环境下的运营能力。
纽劢科技

传感器方案:未透露
是否场端改造:未透露
商业时间:未透露
智驾点评:纽劢科技自主泊车方案主要集中在自主接驾、实时车位寻找、智能经停、智能避障方面的能力,其在自主泊车的过程中,可以识别小孩、地锁、车辆、锥形桶等细分障碍物,通过厘米级定位最大化车端智能,具有鲁棒性高、入位误差距离小于5厘米、入位角度小于1度等特点。
Momenta

传感器配置:4个环视鱼眼摄像头、12个超声波雷达以及消费级IMU和GPS。
是否场端改造:否
商业时间:未透露
智驾点评:相比昂贵的激光雷达建图,Momenta采用视觉为主的方案实现自动化建图,该视觉方案与自动泊车硬件可通用,在建图过程中,通过深度学习算法提取视觉语义特征,使用SLAM技术自动生成基于语义的高精度地图,整个系统可进行云端和车端自动建图,精度达到10cm级别。
魔视智能

传感器配置:4个环视摄像头、12个超声波雷达、5个毫米波雷达。
是否场端改造:否
商业时间:未透露
智驾点评:魔视智能自动代客泊车技术基于V-SLAM完成定位,在不需要场端改造设施情况下可实现跨层泊车,通过实时定位,魔视智能具备传感器检测到的信息与地图进行实时叠加能力,其车辆车辆定位精度可控制在10厘米以内。
来源:AutoR智驾
作者:诺一
本文地址:https://www.d1ev.com/news/shichang/96678
以上内容转载自AutoR智驾 ,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号