高精地图和定位一直是自动驾驶的难点。用传统激光雷达收集地图的方式,不单单传感器成本高,并且数据量庞大,很难实现地图的实时更新。
从 2017 年开始,业内陆续出现了一些基于低成本传感器的众包地图方案,其中包括:
1.Mobileye 的 REM(Rod Experience Mngement):众包地图概念的先驱,基于前视摄像头方案,捕捉道路上的车道线、交通标识等重要信息上传到云端,通过多车众包形成可更新的图层,从而辅助传统高精度地图定位。
2. 博世的 Bosch Rod Signture 以及大陆的 E-Horizon:概念与 REM 类似,但是在传感器端加入了毫米波雷达。
去年 CES,国内的边缘计算公司地平线向 GeekCr 展示了基于其「征程」第二代芯片架构的自动驾驶计算平台 Mtrix(这个平台今年获得了 CES 2019 的创新奖)。

当时他们就向我们透露,也会基于「征程」二代芯片架构做自己的众包地图方案,今年的 CES,他们兑现了这个承诺,正式发布了 NvNet。
地平线官方将 NvNet 称为「众包高精地图采集与定位平台」。它所采集的数据效果如下图。
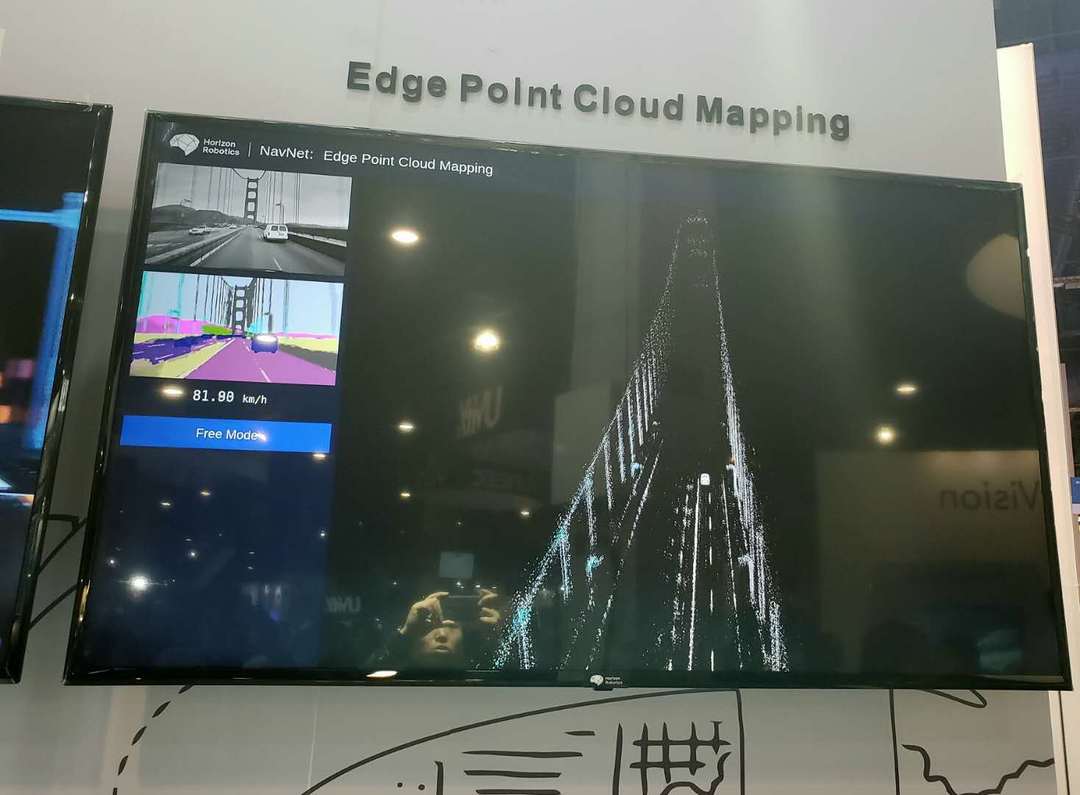
当第一次看到效果图时,你可能会产生一个错觉:「这不是激光雷达所产生的点云图吗?怎么感觉密度有些稀疏?」
事实上 NvNet 与 REM 一样,也是仅仅依靠一个单目摄像头来收集数据的,只不过他们依靠自己的视觉算法计算出了各个像素点的距离。其具体原理可以概括为:
相较于 Mobileye REM 之前展示的 2D 效果图,地平线 NvNet 给出的 3D 点云图明显有着更高的信息密度。因为使用单目摄像头,地平线的 NvNet 系统的成本和维护费用会远低于现有的激光雷达方案,在量产上有更大的优势,形成大规模众包地图的采集和更新能力。
在 CES 的展馆外,我体验了地平线搭载 NvNet 方案的测试实车——一辆奥迪 Q7。

在车顶上地平线加装了一个单目摄像头,横纵向视角分别为 90 度和 50 度。摄像头通过一根链接线接入车内的芯片系统板。

我坐在车内后排,手中通过他们提供的一台平台电脑来查看 NvNet 实时生成的点云图。下面是演示过程中,平板电脑上的效果视频:
可以看到,NvNet 在实际道路上生成的实时点云图还是很稳定的,道路旁的标志物(白色)树木(绿色)以及马路边缘(紫色)等都通过点云图显示了出来。甚至当我们路过一个大型停车楼时,NvNet 也把它清晰的标注了出来。(上面视频中 2 分 20 秒处)
地平线的余轶南博士告诉我,由于 NvNet 捕捉的地图信息密度高于一般的众包方案,他们通过 SLAM 技术,利用单目摄像头的感知再结合从车辆本身的部分信息,就可以实现车辆在 NvNet 地图中的定位。
现今的高精地图领域可谓是商业结构非常复杂,除了传统的图商之外,主机厂、Tier1、芯片供应商以及算法公司等等都有所涉及。
在自动驾驶领域,地平线定位于 Tier2,提供核心芯片和算法方案。在 NvNet 的落地上,余轶南透露地平线会和图商以及车辆运营企业合作,通过众包方案进行地图数据的采集工作,并通过局部地图和云端地图的比较,将地图差异上传到云端,对云端的全局地图进行更新。此外,地平线计划在前装的 ADAS 系统上整合 NvNet 系统,并提供数据给需要地图数据的客户,地平线本身不涉及运营和数据业务。
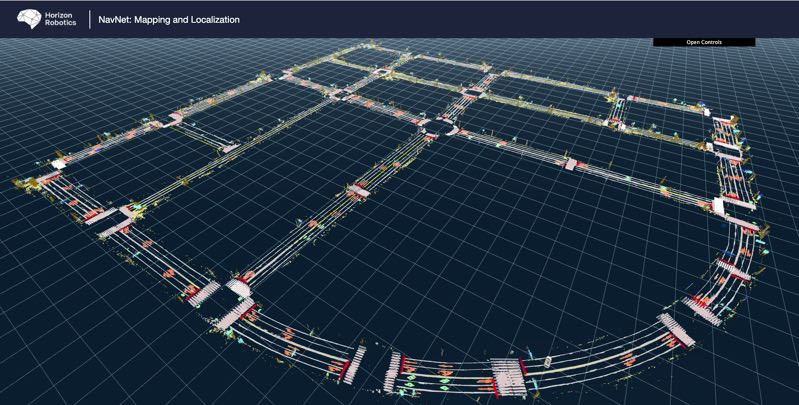
视客户的不同需求,地平线还可以将 NvNet 的原始点云数据做进一步的结构化处理,形成 2D 的道路环境图层,这样更便于辅助传统的高精度地图。下图便是 NvNet 在中关村收集的数据在结构化之后产出的效果图。
对于地平线这样的 Tier2 来说,推出众包地图方案可以说是出于发展战略的一种必然选择。因为它既可以展示自身芯片+算法的感知处理能力,同时也拓展了在自动驾驶行业中的落地领域。不过,所有基于众包概念的方案,都要依赖庞大的装车量来提供效果,这就意味着地平线必将以进入前装市场作为最终目标。
此次在 CES 见到地平线的 CEO 余凯博士时,他对我说了一句意味深长的话:「做前装是一件困难、复杂且研发周期很长的事,我们一定要耐得住寂寞,不去跟所谓的热点。」相信这句话也会帮助他们走得更远。
原创声明: 本文为 GeekCr 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCr」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCr 微信公众号: GeekCr 极客汽车(微信号:GeekCr)∓ 极市(微信号:geeket)。
来源:geekcar
本文地址:https://www.d1ev.com/news/shichang/85925
以上内容转载自geekcar,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号