现如今,无人驾驶汽车已经可以做到在事先经过仔细扫描和测绘的标记良好的道路上行驶。在这种情况下,无人驾驶汽车已经可以遵循美国道路的常用规则,识别交通信号和车道标记,注意到人行横道和街道的其他规则特征。
然而,在实际道路情况中,许多道路指示标识会褪色,也存在模糊的标志牌隐藏在树木后面的情况,每个十字路口的情况也不尽相同。此外,美国有225万公里的公路(约占全美公路的1/3)是尚未铺设完成的,或者是没有道路标记,例如车道标志或禁停线等。这还不包括无数的私人道路、未铺设车道或越野小道等。
当规则不明确或不存在时,以遵守规则为基础的无人驾驶汽车该怎么办?当乘客发现他们的车辆无法把他们带到目的地时,他们又该怎么办?
为极端情况做准备
开发无人驾驶先进技术的大多数挑战都涉及要处理不常见的情况,或超过系统正常能力之外的事情。对于无人驾驶汽车来说,这也是必需的。
很多时候,在公路上行驶的无人驾驶汽车会遇到各种问题,比如在建筑之间穿行,或者识别到看起来像停车标志的涂鸦。而在正常公路之外,无人驾驶汽车会遇到各种各样的自然环境,比如道路被树木、洪水和大水坑所阻,甚至还有动物挡道等。
在美国密西西比州立大学的先进车辆系统中心(Center for Advnced Vehiculr Systems),研究人员已经开始挑战训练算法,以应对那些几乎从未发生过、难以预测和难以模拟的情况。研究人员试图将无人驾驶汽车置于最困难的境地:在汽车没有事先了解的区域驾驶,没有可靠的基础设施,比如公路上没有道路指示和交通标志,或者在未知的环境中看到类似北极熊的仙人掌等。
这项研究将虚拟技术和现实环境结合起来。研究人员对逼真的户外场景进行了高级模拟,用来训练人工智能(AI)算法,让它接收到信息并对其进行分类,标记树木、天空、开阔的道路和潜在的障碍等。随后,研究人员会将这些算法转移到专门建造的四轮驱动测试车辆上,并将其发送到专用的越野测试轨道上,在那里他们可以看到算法如何工作,并收集更多的数据,以供进一步模拟测试。
从模拟训练开始
密西西比州立大学的研究人员开发出专门的模拟器,可以为车辆模拟广泛的现实户外场景。该系统生成一系列不同的气候景观,如森林和沙漠,并能显示植物、灌木和树木如何随时间生长。它还可以模拟天气变化、阳光和月光,以及9000颗恒星的精确位置。
该系统还模拟了无人驾驶车辆常用传感器的读数,如激光雷达和摄像头。这些虚拟传感器收集的数据可以作为有价值的训练数据输入神经网络中。
美国密西西比州立大学自动车辆模拟器生成的模拟沙漠、草地和森林环境
建立测试轨道
模拟仅仅是对真实世界的描述。密西西比州立大学已经购买了20公顷土地,并在开发远离公路的无人驾驶车辆测试跑道。这处土地非常适合进行越野测试,在其所处的密西西比地区,坡度异常陡峭,有时候甚至高达60%,而且植物种类繁多。
研究人员已经选择了一些这片区域中对无人驾驶汽车特别具有挑战性的自然特征,并在他们的模拟器中准确地复制了它们。这让研究人员可以直接比较模拟结果和现实生活中实际驾驶的结果。最终,研究人员也会创建类似真实和虚拟相匹配的其他类型景观,以提高他们车辆的适应能力。

在现实生活和模拟环境中出现的道路
收集更多数据
密西西比州立大学的研究人员还制造了名为Hlo Project的试验车,它配有电动马达、传感器和电脑,可以在各种越野环境中导航。Hlo Project测试车有额外的传感器来收集关于其实际环境的详细数据,这可以帮助研究人员构建虚拟环境来运行新的测试。

Hlo Project测试车可以收集关于在崎岖地形中驾驶和导航的数据
举例来说,测试车上的两个激光雷达传感器被安装在汽车前部的交叉角度,这样它们的光束就能扫描即将接近的地面。它们可以共同提供关于表面粗糙或光滑程度的信息,以及从草地、其他植物和地面上其他存在物获取读数。
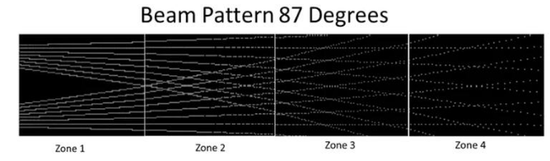
激光雷达的雷达光束交互交叉,以扫描车辆前方的地面
研究人员已经从研究中看到许多令人兴奋的早期结果。例如,他们已经证明了在模拟环境中训练的机器学习算法在现实世界中同样高效。
与大多数无人驾驶汽车研究一样,未来还有很长的路要走,但研究人员们希望,为极端情况开发的技术也将有助于无人驾驶汽车在今天的道路上发挥更大的作用。
来源:盖世汽车
本文地址:https://www.d1ev.com/news/shichang/80886
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号