现在国内汽车圈最火的除了新能源和车联网以外,自动驾驶应该也是一个非常热门的话题。不过在主机厂,我们不会称之为自动驾驶,而是会简称为“ADAS”。不仅仅是造车新势力,还有一些互联网公司也在花重金研发者ADAS,那么真正的自动驾驶离我们还有多远?未来造车新势力能够研发出没有方向盘的汽车来吗?
什么是ADAS?
ADAS的英文全称是Advanced DriverAssistance Systems。从字面上就可以看出,ADAS并不是我们所理想的“自动驾驶”,直译过来应该是驾驶员辅助系统的意思。按照北美标准,把ADAS从Level1到Level5分成了5级,可能未来要到Level5才能实现我们理想状态中的、没有方向盘的全无人驾驶。
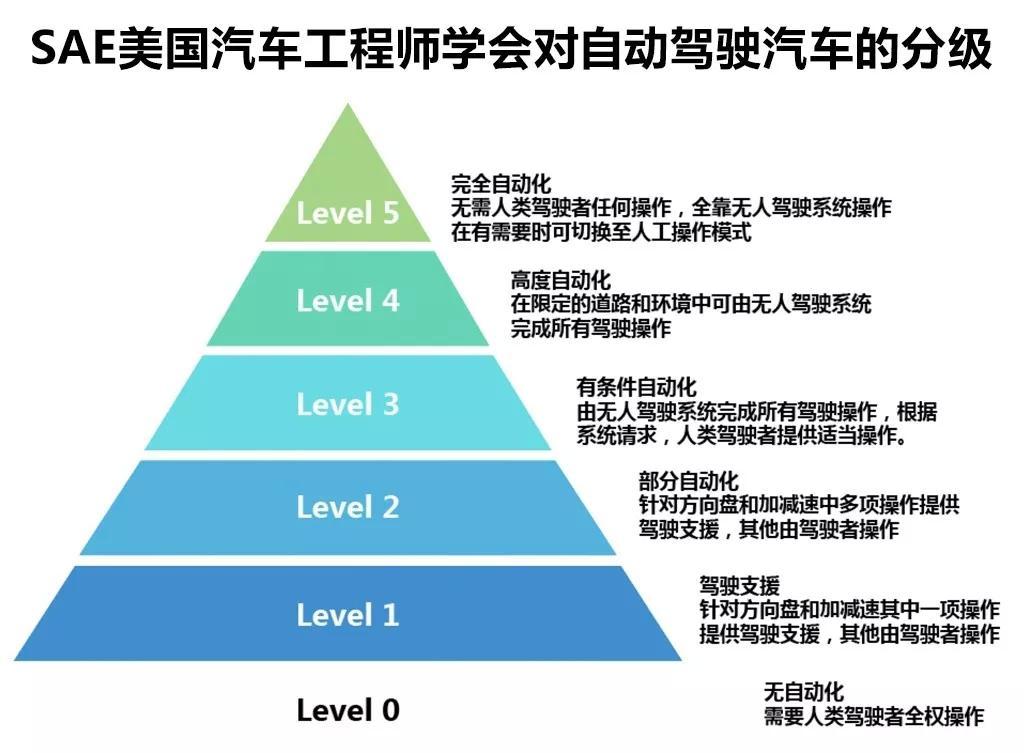
美国SAE(汽车工程师协会)为ADAS定下的标准。
目前市面上,我们能买到的拥有最先进ADAS系统的特斯拉,也只能将将做到Level 2的级别。新一代的奥迪A8号称可以做到Level 3 ,不过目前量产的版本,厂方只是宣称配备了具备Level 3功能的硬件配置,并没有开通软件功能,而软件还在研发迭代中,需要等到后续成熟完善后再给车辆升级。

丰田的e-Palette目前也只停留在概念阶段,虽然丰田给出了对未来的美好思考,但实际实现还有很长的路要走。
自动驾驶的刚性门槛——机器学习的数量积累
要了解ADAS的开发过程和方法,就要大概了解以下Ai人工智能的算法原理。虽然Ai听起来很高大上,其实作为文科生代表的“罗辑思维”,在2018跨年演讲上就用最通俗的语言解释了Ai的实现原理:Ai实际上是用电脑算法模拟了人类的思维方式,通过机器学习(就好比人类从婴儿阶段就开始不断接受外界各种事物,行成自己的判断)让机器的判断力不断的进步。过程中可能会犯错,但经过大量的数据积累(也叫训练),机器能做出的判断,理论上可以接近或达到人类的水平。所以,用Ai人工智能的方式开发自动驾驶汽车就可以把过去的不可能变成可能。
很多人觉得自动驾驶的核心在于Ai的算法逻辑。其实不然,人工智能最大的特点就是算法显得并不那么重要,重要的是机器学习的量有多少。机器学习的量越大,能够做出判断的准确率就越高。
所以各大车厂或互联网公司开发ADAS的核心在于要做大量的机器学习。这种机器学习既可在测试场(封闭道路条件下)进行,也可直接在公路上进行,当然,后者的效果最好,但存在一定的风险性。这也是为什么百度的阿波罗计划很早就提出免费开发平台给主机厂使用,其目的就是为了更多的进行机器学习。
自动驾驶的硬件门槛——成本高昂的硬件需求
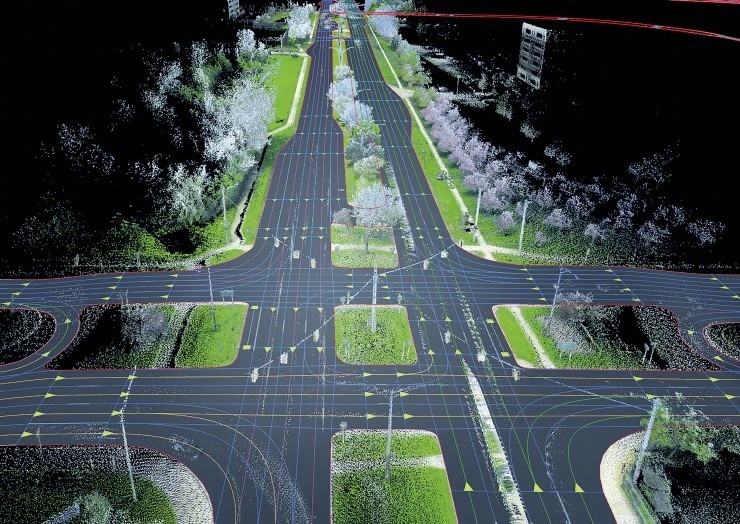
很多人都知道,要想实现更高级别的ADAS就需要给车辆配备非常多的传感器,诸如:多个毫米波雷达、多个高精度摄像头甚至激光雷达。这些传感器会产生大量的数据,电脑除了需要处理毫米波雷达产生的距离数据、摄像头传来的图像数据以外,激光雷达可以实时扫描车辆360度的景物并实时生成3D数模,可以想象这样的数据量有多大。而这些数据都需要通过计算机来处理,判断并且实时生成伺服信号控制车辆。
激光雷达实时生成的3D建模,目前单个激光雷达的成本高达数千至数万美元。
除了这些价格高昂的传感设备,在私服机构上还需要足够的冗余设计。比如当电脑可以直接控制转向系统操控车辆之后,原有的转向系统一旦发生故障,必须有冗余的转向硬件可以马上投入工作。
制动系统也是同样的道理,如BOSCH的iBooster系统、Continental的MKII在正常的刹车系统失效后,ESP可临时取代原有刹车系统完成必须的制动,而这两个系统都必须独立设计。
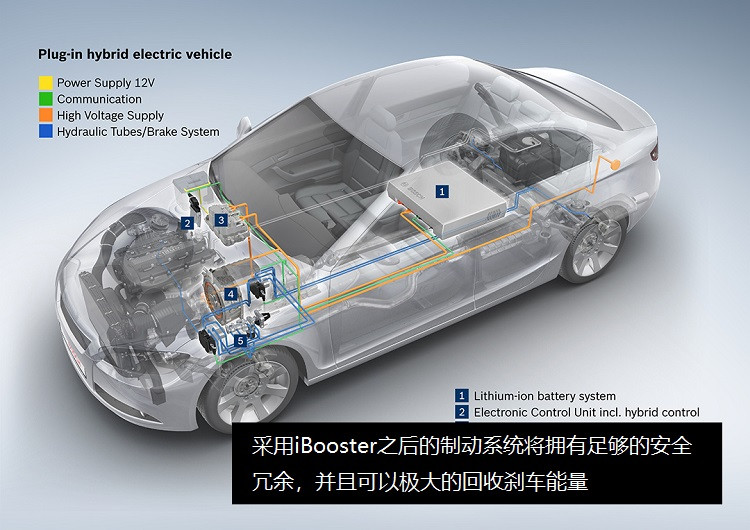
拥有足够冗余设计的刹车系统。
目前进展到什么样了?完全自动驾驶离我们有多远?
如果说硬件配置可以花钱花成本解决的话,目前自动驾驶最大的障碍就是软件的成熟度了。开过特斯拉的朋友肯定体会过特斯拉ADAS的先进之处。在城市堵车时,它可以完全实现油门刹车的自动控制,实现自动跟车功能;在高速上也可以自动保持车道、自动与前车保持车距;甚至驾驶者只需要触发转向灯,它就能实现自动变道和自动超车。
如果亲身体验过特斯拉的这些功能,似乎会觉得自动驾驶已经离我们很近了。我在和开发ADAS的工程技术人员沟通需求的时候,曾经提出过一个假设:既然特斯拉已经实现了自动变线和自动超车,我们如果要实现ADAS性能Leading的话,为什么不能再进一步让它能够自动识别和进入匝道?工程师给我的回复是:这个太难了。
的确,要实现这个用户看似顺理成章的需求,意味着除了要有足够多的硬件冗余,足够多的机器学习以外,车辆还要能够实现V2X通信(车辆与基础设施的通信),还需要有高精度地图支持。前两者可能花钱和时间可以实现,但后两者不是主机厂靠一己之力可以做到的。
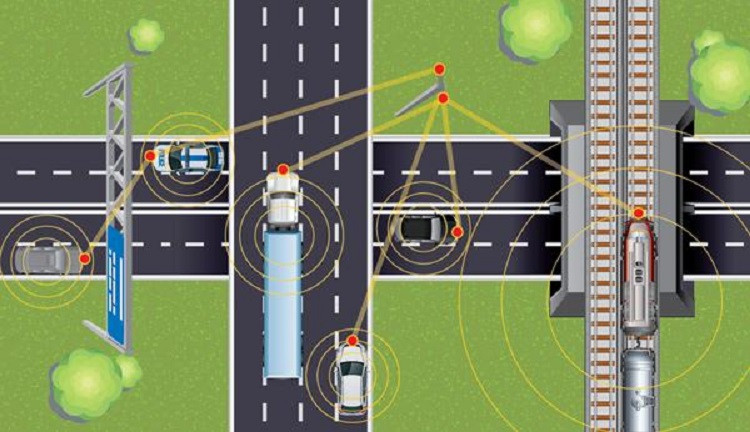
V2X技术场景演示:车车通信、车与道路设施的通信。
高精度地图可以精确到每辆车、每个路牌,红绿灯、匝道信息等,并且精度是毫米级的。
完全自动驾驶离我们到底有多远?如果真正深入了解自动驾驶的原理机制,以及这个行业的发展现状的话,我只能说离我们还很远。现在各大主机厂都在尽可能实现L3的突破,但即便实现L3,其实也不是真正意义上的自动驾驶,只是在一些特定条件下可以实现全无人驾驶。那么这个特定条件当然就很苛刻了,比如:堵车的时候、高速巡航的时候。除此之外大部分使用场景还是需要人来控制。之所以现在各大主机厂把ADAS吹得神乎其神,无外乎是为了展现自己的科技实力,以获得资本市场和地方政府在资源上的支持。
我曾经与MIT开发人工智能的专家交流过目前Ai的瓶颈到底是什么。得到的答复是“”最主要的瓶颈是我们目前计算机的运算能力。科学家从理论上已经验证了Ai的潜力,只要有庞大的运算能力,人工智能完全可以替代人,不过这个庞大的运算能力可能是目前人类科技还无法实现的。所以真正的自动驾驶离我们还比较遥远,因为除了运算能力,还包括基础设施的支持(V2X通信),传感器(激光雷达)和伺服机构(冗余设计)的成本等等,都需要相当长的时间才能商业化
来源:电动邦
作者:汤企隆
本文地址:https://www.d1ev.com/news/jishu/73003
以上内容转载自电动邦,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号