盖世汽车讯 7月18日,加州大学洛杉矶分校(UCLA)工程师开发出新计算程序,使自动驾驶机器人能够更快、更准确地感知、绘制地图并适应其环境,从而显著提高机器人实时导航周围环境的能力,进而提高搜救机器人的救生能力,并增强自动驾驶车辆或行星探索中当前使用的技术。
移动机器人依靠同步定位和绘图来有效且高效地运行。近年来,激光雷达技术使机器人能够可视化其操作环境(绘图),并同时了解如何导航其动态环境(定位)。然而,基于激光雷达的机器人在应对海量数据处理和计算复杂性时,其测绘精度和反应时间仍然存在根本性限制。
在项目研究员、UCLA萨穆埃利工程学院(Samueli School of Engineering)机械和航空航天工程系助理教授Brett Lopez的带领下,研究团队开发出新算法来应对这些挑战。基于当前激光雷达传感技术的直接激光雷达惯性测距和测绘(DLIOM)是加州大学洛杉矶分校在2023年电气和电子工程师协会(IEEE)国际机器人与自动化会议上提出的一项研究重点。
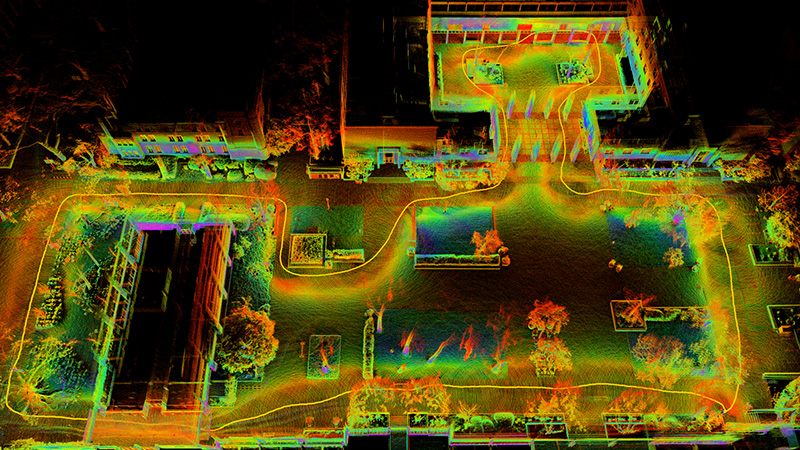
该研究的第一作者、UCLA电气和计算机工程博士生Kenny Chen 表示:“我们开发的算法使用紧凑的传感器和计算套件,可实时生成几乎所有环境的精确几何地图。与当前其他解决方案相比,新算法具有多个关键优势,包括更快的计算速度、更好的地图精度和更高的操作可靠性。”
来源:盖世汽车
作者:刘丽婷
本文地址:https://www.d1ev.com/news/jishu/206804
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号