随着汽车电动化、智能化技术应用的不断深入,车辆动态行驶下的潜能正在被得到释放。为此在车辆动力和车身控制方面,也在不断涌现出更多的功能要求。配合当前行业的高度竞争,整车企业期望通过更多的车辆配置来提升竞争力,以赢得销量。
车辆配置增加意味着车辆控制需求也同步在增加,如果按照以往单纯的通过叠加控制器的方式来实现多功能控制的话,一方面会使得线束变得更加繁琐和错综复杂,同时也会增加硬件的成本,不利于在当前情况下达到降本的目的。
针对上述挑战,麦格纳新一期“黑科技来了”系列技术分享中,麦格纳动力总成软件工程经理何松和麦格纳动力总成产品线管理高级专家冯永升共同带来了如何在软件定义汽车的技术框架下,通过能量与运动控制软件来提高整车驾驶性能,同时做到硬件成本可控。

软件差异化去破解硬件同质化的难题
当下汽车“卷”的原因一方面来源于价格端的压力,另一方面则来源于硬件的同质化。并且随着供应链信息愈发的透明,硬件同质化的现象长期来看也得不到解决。
在此背景下,软件能力成为差异化竞争的重中之重。何松列举了两个软件提升整车体验的案例。一是扭矩矢量控制,二是主动侧滑角限制控制。
在扭矩矢量控制功能中,典型的工况是在低附着力路面或者高附着力路面下车辆过弯时的姿态控制。
当车辆在上述路况行驶时,如果驾驶员对速度把握不准,极易发生甩尾甚至失控,即使是搭载四驱功能的车辆也对驾驶员的操控技术要求极高。而同样是四驱的车辆,搭载麦格纳车辆运动控制软件后,即使是新手司机也可以平稳地通过。
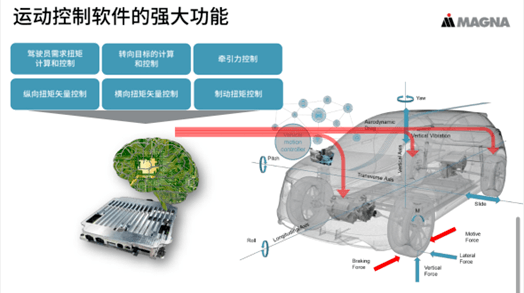
其控制逻辑为,当车辆过弯转向时,通过麦格纳扭矩控制功能,额外增加对驱动电机和制动系统的控制,而不是像往常一样仅仅依靠转向来过弯。在转弯过程中,系统首先计算和处理驾驶员的需求扭矩以及方向盘的转向需求,然后结合驱动电机和制动系统通过横向和纵向的扭矩矢量控制,来处理各车轮打滑的情况,以不断分配调整四个车轮的扭矩值,保证车辆过弯时的姿态控制。
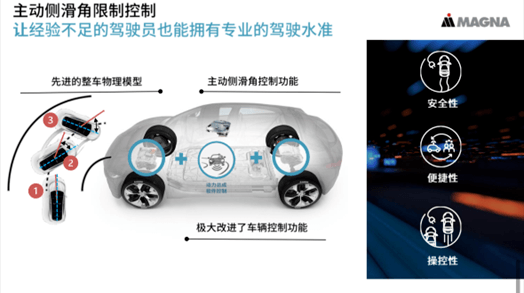
另外一个功能便是主动侧滑角限制控制。降低车辆行驶过程中的侧滑角有助于提升轮胎横向摩擦能力,以便更好地控制整车姿态,进而降低车辆驾驶难度。
为了实现有效限制,需要实时监控整车的限滑角数值。常见的监控方式为采用惯性测量装置,如IMU检测装置。但考虑到IMU价格较高,大量搭载势必会增加成本。麦格纳通过实时的计算甚至是预测整车的姿态和关键信息,进而在无需增加硬件的强狂下实现对侧滑角的控制。同时,基于该控制功能也可以帮助驾驶员做更加激烈的驾驶尝试,如漂移功能等。
除上述两种功能外,麦格纳运动控制软件还可通过对两驱和四驱的动态切换来实现对车辆能量的控制。
在湿滑的山路上正常行驶时,考虑到行驶动力需求以及能耗表现,车辆可以以两驱的模式行驶。但在弯道出弯处,如果出现了意想不到的结冰路面(低附着力系数),搭载麦格纳运动控制软件的车辆便可以立即启动全轮驱动,并结合车辆姿态控制功能来确保车辆平稳通过。该功能可通过与ADAS功能结合,利用图像手段来提前判断并触发。
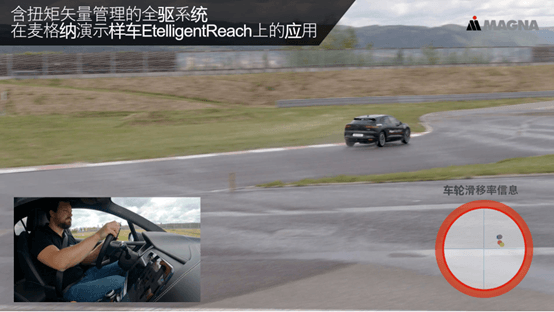
以上仅仅是麦格纳运动控制软件的一些应用场景介绍,为了测试实车表现,麦格纳在其样车EtelligentReach实现了搭载应用,由麦格纳驾驶员Simon进行了完整的实车场景测试。
软件解耦,跨域融合
早在2011年麦格纳就开始对车辆控制系统的研发。早期以车辆四驱和纵向扭矩控制功能的开发为主,2017年在此基础上开发了横向扭矩矢量控制,在之后不断对功能进行升级,并在电动车型上也实现了应用。
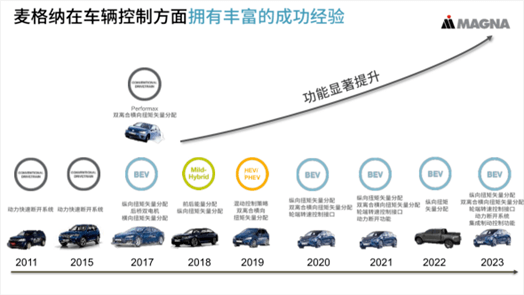
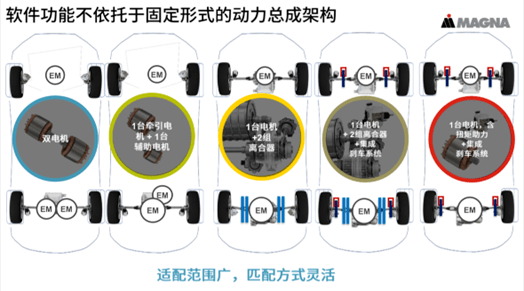
进入软件定义汽车时代,麦格纳推出了SaaP(Software as a Product)概念。通过与SaaP融合,结合电动汽车动力系统的多样性,麦格纳车辆控制软件不再依托于固定形式的动力总成架构,对多种动力总成架构都能实现很好的适配。
作为麦格纳SaaP(Software as a Product)概念的核心,软件解耦和跨域融合在整个功能的实现过程中扮演着非常重要的作用。基于此,麦格纳车辆控制软件可以在不同的硬件平台中实现快速部署,不仅可以适配各种动力架构,通过与硬件的解耦,不同的控制器也可实现适配。从而在满足多种功能的情况下,实现成本可控。
如何实现软件解耦和跨域融合呢?何松介绍到,以上述场景案例为例,麦格纳车辆运动控制软件只负责处理各种驾驶情况下车轮扭矩的需求值,具体的执行则由对应的执行机构在收到执行信号后再去独立执行。以车辆漂移为例,在整车层面去计算和处理轮端所需要的扭矩值,结合驱动电机和制动系统的状态,分别对其进行控制,控制策略完成后,再将控制信号交由其各自执行单元,由执行单元进行最后的控制执行。当然,在控制信号传导的过程中涉及到多控制器的协同,由于不同的电子电器架构会对具体执行产生影响,因此在开发过程中介入的阶段也有所不同。
对于传统的分布式电子电器架构,受车辆通信标准和线束设计的限制,因此在开发初期就需要介入。而对于集中式的电子电器架构,在开发后期介入也可满足开发周期要求。
来源:第一电动网
作者:NE时代
本文地址:https://www.d1ev.com/kol/224117
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!







 京公网安备
11010502033163号
京公网安备
11010502033163号