作者 | 德新
编辑 | 王博
1. 全球无人驾驶大洗牌,Robotaxi越发向头部聚集
全球无人驾驶落地正呈现两幅面孔。随着资本热潮褪去,一部分公司在资金和研发上已经难以为继,Robotaxi落地的资源和希望,正无限向头部公司聚集。
10月,Argo宣告关闭,员工将分流至福特和大众,并转向量产自动驾驶的研发;
9月,Aurora Innovation寻求出售,目前市值已跌至15亿美元,不足其鼎盛期的1/10;
ZOOX卖身亚马逊之后,一部分研发转向无人配送,而今年又有消息传出,亚马逊关闭了部分无人配送项目。
假如把L4无人驾驶比喻成一座山峰,过去五六年间涌现的那些技术公司们,正在进入更难更险的路段。
观察头部公司们的表现,实现「无人化」的突破是一个关键的分水岭。那些跨过「无人化」的公司仍在快速挺进,与行业中的裁员、关停呈现完全不同的一番景象。
Waymo近期获得加州CPUC批准在旧金山、湾区部分城市等区域向公众提供无人驾驶网约车服务;并且宣布了和极氪合作的新进展,基于概念车ZEEKER M-Vision打造量产车,车型将在2024年具备量产条件。
继今年早些发布量产车Apollo RT6之后,百度也在本周举行Apollo Day,第一次完整系统地向外界阐述了Robotaxi无人化落地新阶段的思考。多位技术大牛,分享了大量百度在过去十年中的珍贵经验和独到的技术判断。
百度也宣布,2023年将扩大业务规模,在更多区域开展全无人自动驾驶运营,着力打造全球最大的全无人自动驾驶运营服务区。
浪潮滚滚向前,头部公司们吹响了Robotaxi大规模落地的冲锋号。
2. Robotaxi 2.0时代:百度Apollo的技术判断
本届百度Apollo Day的一大看点,是百度Apollo以及百度研发体系的多位大牛集体登场。
更精彩的部分是基于百度的AI、计算机视觉、地图等的技术体系,Apollo的思考和技术判断。
非官方的说法是,这是一场「价值百万」的技术分享。以百度十年千亿级的研发投入来说,这场分享价值百万毫不为过。
我们先从陈竞凯的分享讲起,他首先纲领性地抛出了Apollo的几个技术选择:
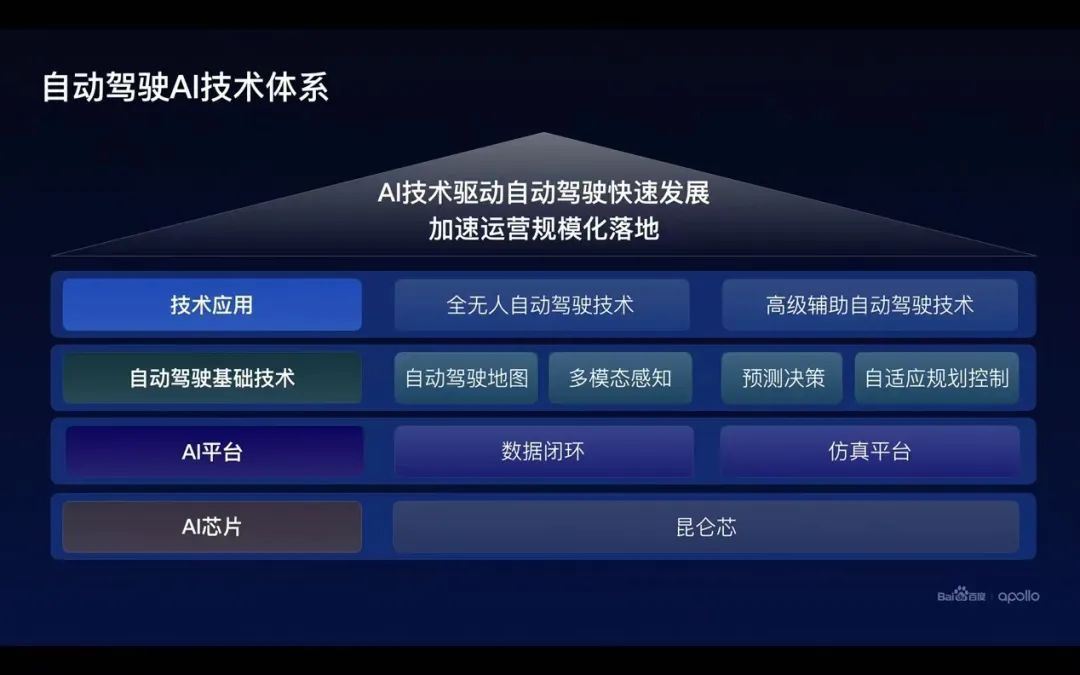
工程化的技术体系
打造能大规模落地的Robotaxi,核心是搭建安全、可规模化、智能高效的自动驾驶系统。从系统设计上有两种思路:一种是偏向学术派的,统一建模、端到端的解决方案;另一种是工程导向的,做系统拆分,逐个突破。
端到端的解决方案存在很大的不确定性,虽然技术发展迅速,但到底在未来两年还是十年能取得突破仍是未知的。目前百度Apollo的技术搭建仍然沿着工程化的思路,将车载体系大致分为:地图、感知、预测决策、规划控制四个大块。
高精地图不是阻碍,而是助力
行业今年提出了「重感知、轻地图」的思路,原因是地图资质难、成本高、难获取。而百度认为高精地图≠高成本的阻碍,难点在于车辆第一次通过已经变更的现实世界时,如何安全通过,解决方案是实时地图与离线高精地图的融合。
多模态前融合感知,而非纯视觉
以特斯拉为代表,行业今年在传感器选择上出现了较大分歧。百度的判断是,充分发挥各传感器的优势,并且在发展过程中将后融合方案转为前融合方案。
学习型PnC是实现全无人的必由之路
百度最初的预测和决策是分立的两个系统模块。预测由数据驱动,而决策规划控制是基于规则的方案。规则系统的问题是随着系统迭代,策略分叉导致投入产出比越来越低,且面对城市扩张、场景变化时,不仅需要分支节点的调整,而是需要从主干到分支的全面调整,基于规则的PnC是难以规模化的。
因此,百度的思路以渐进的方式,以学习型的系统来吸收规则系统,数据驱动PnC的迭代,同时规则也作为安全的兜底。
数据是仿真系统的灵魂
仿真系统的价值不仅是针对单一场景进行模拟,而是对每次迭代带来的系统表现变化进行完整的评价。
因此仿真系统结合大规模的数据分布来构建是必须的,数据是仿真系统的灵魂。将真实世界事件发生的概率与仿真挂钩,才能在仿真系统一个相对扭曲的分布中,获得更准确的对系统能力的度量。
3. 迈向全无人:Apollo的核心技术支柱
随着百度在重庆、武汉开展全无人的商业运营试点,以及Apollo RT6的量产推进,百度下一阶段的目标是:持续扩大业务规模,在更多区域开展全无人运营,打造全球最大的全无人驾驶运营服务区。
Apollo Day上也展示了面向更大范围的无人化,百度Apollo当前几个关键的技术支柱。
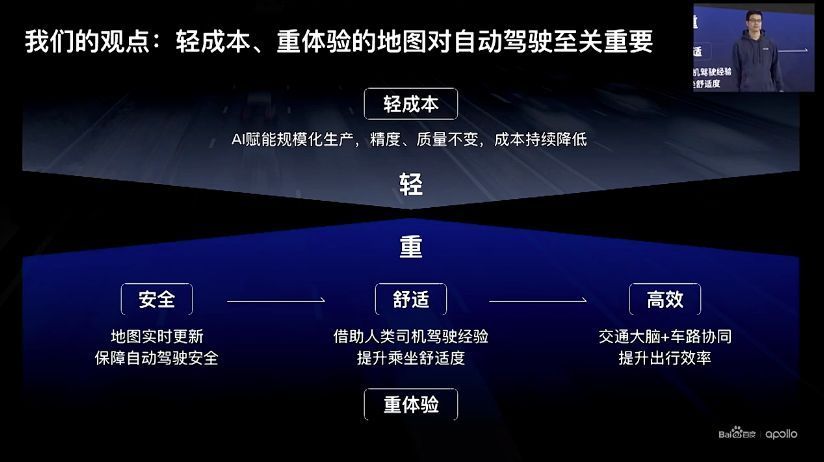
3.1 轻成本、重体验的地图,是L4系统达到99.99%的关键
当下「重感知、轻地图」的趋势,是一种从成本出发的技术主张。而百度Apollo坚定认为只有用上了高精地图,L4自动驾驶才能达到99.99%的成功率。比如当道路标识出现遮挡、污损、新旧重叠时,单靠实时感知无法应对。
Apollo的勇气来自于,百度是行业内唯一一家既懂地图又深耕自动驾驶的公司。
高精地图要大规模应用,首先要降本。从百度的经验看,2020 - 2022年Robotaxi高精地图单公里生产成本逐年明显下降。目前,百度高精地图构建自动化率达到96%。
大规模地图生产的难点是自动化的数据融合,关键是融合的绝对/相对精度要达到厘米级。在数据融合上,百度做了3方面的技术创新:多层级的图优化;场景化关联和匹配;以及基于学习的匹配算法。
其次是提升体验。
百度地图本身有超过1200万公里的路网覆盖,日均20亿公里的轨迹数据,通过向数亿的司机学习,形成全路网级的驾驶知识图谱。这个图谱包括:行驶速度、变道时机、变道轨迹等等。这一层输入,是自动驾驶由笨拙变得顺滑的关键。
第三是通过百度地图和智能交通技术,提高通行效率。
3.2 文心大模型,2.0时代的多模融合感知体系
「大模型,已经成为自动驾驶能力提升的核心驱动力。」这是王井东的观点。
百度Apollo自动驾驶感知1.0,是以激光雷达为主,加入环视、毫米波的后融合感知方案,后融合是以规则驱动的,因此泛化能力不够。
感知2.0是多模态、前融合、端到端的方案为主;除此之外,补充以远距离的视觉感知以及近距离的鱼眼感知。大模型在其中发挥的作用,包括数据挖掘、数据标注等等。
自动驾驶有几类典型难题:
· 远距离物体感知;
· 激光雷达升级点云变化,引发的数据重标注挑战;
· 长尾数据挖掘,比如异形车、行人、低矮物体等;
文心大模型的应用,主要是用大模型提升车载小模型的感知能力;并且可以利用弱监督预训练的方式挖掘长尾数据。
自动驾驶数据集中,2D数据容易获取,3D数据获取相对困难。可以利用2D标注数据和3D标注数据,迭代自训练的方法得到一个效果不错的感知大模型,再利用大模型对数据进行3D的伪标注,同时使用模型蒸馏的方法,获得感知效果比较好的小模型。
3.3 高提纯、高消化的数据闭环是如何设计的?
无人车跑得越远,会遇到各种意想不到的场景,比如羊群过马路。解决罕见、长尾场景,是数据闭环的价值。与感知、规控、决策的技术栈相比,大规模数据闭环的建设是行业里的崭新命题。
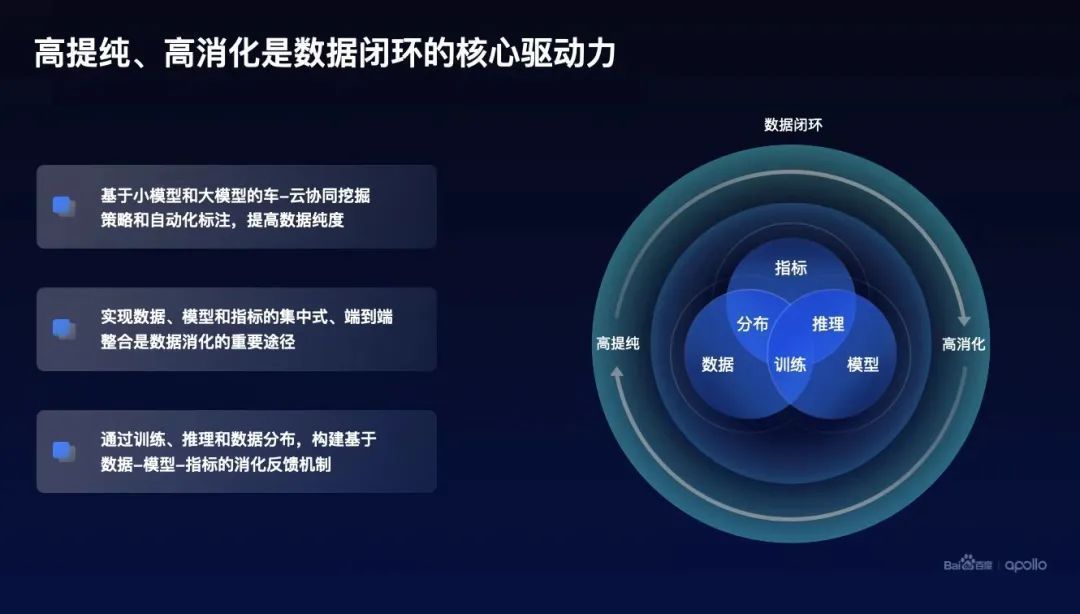
数据闭环的前半是大量数据带来的存储和标注的压力,后半是大规模数据用于训练的计算量需求暴增。百度Apollo设计的数据闭环,核心是解决「高提纯、高消化」的问题。
在数据提纯上,百度的方案是利用车端小模型+云端大模型,做高效的挖掘和自动化标注;数据消化架构,实现自动化训练,具备联合优化和数据分布理解的能力,利用高纯度的数据进一步提升自动驾驶系统的整体智能水平。除此之外,训练、推理以及数据分布在数据消化过程中,形成有效的反馈机制,进一步提升数据消化的整体效率和效果。
3.4 L4与L2+共生,百度的独家秘技
百度是行业内第一家同时具有L4 Robotaxi技术和量产L2+辅助驾驶方案的公司。
其内部的判断是:2023年具备城市道路辅助驾驶能力的产品上市后,会带动C端用户需求,并在2025年引发消费者对高阶辅助驾驶/自动驾驶的需求爆发。
百度的L2+ 领航辅助驾驶产品ANP 3.0 将在2023年夏天在首家客户的车型上量产上市,支持复杂城市道路场景,并且衔接融通高速和泊车场景。
ANP 3.0的硬件是双Orin-X芯片,部分配置800万像素摄像头,搭载半固态激光雷达。从技术特点来讲,ANP 3.0的视觉感知和激光雷达感知,是两套独立运行、低耦合的系统。
背靠百度Robotaxi的数据积累,ANP 3.0在BEV的数据供给上有先天优势,融合LiDAR信息的L4感知结果可以作为BEV模型的标注数据,直接用于模型预训练。目前,百度Robotaxi的累计里程超4000万公里。
其次ANP使用了一套为智驾规模化轻地图方案,提升安全,也降低制图成本。
百度内部认为实现无人驾驶商业化的最佳路径是:
前期在限定区域实现技术积累,通过技术降维和L4数据,为L2+产品做热启动;
更长期看,利用L2的规模优势,提前收集L4泛化所需要储备的长尾问题。
内部预期未来3 - 5年内,百度领航辅助驾驶产品搭载量有望突破百万,百万级的车辆营造的数据壁垒也将有效成为L4的技术护城河。
3.5 One more thing:自研昆仑芯片
目前,百度自研的昆仑芯片已经量产了两代,实现数万片的商业化部署。第三、第四代产品都在研发中,三代芯片预计明年量产,四代芯片后年量产。

作为一款云端通用人工智能计算处理器,昆仑芯CEO欧阳剑介绍,昆仑芯主要是几大优势:是业界为数不多大规模部署的AI芯片,具备完善的生态,灵活易用。
自动驾驶的业务和模型算法复杂度不亚于数据中心,而昆仑在数据中心积累的优势可以很好地移植到自动驾驶上。
目前昆仑芯二代已经在百度的Robotaxi系统上进行了完整的适配,并开始道路测试。
4. 什么样的公司有望无人驾驶落地的胜利?
今年无论是特斯拉的AI Day,还是百度的Apollo Day,众多科技公司的开放日都变得极其技术化。
一方面,面对自动驾驶、机器人这些尖端前沿的话题,行业公司尝试开放一部分的思考加速整个行业的技术推进;另一方面,公众对无人驾驶的商业应用、技术实现和使用体验也逐渐显露出了浓厚的兴趣。
无人驾驶/自动驾驶/高阶辅助驾驶的落地,是安全、成本、体验的极致平衡。与无人驾驶相比,辅助驾驶更重成本和体验;而无人驾驶首重安全和成本。
一位业内人士评价:L2与L4之争,好比是飞机和火箭。L2进阶,飞机越飞越快、越飞越远,但仍然难以到达月球,这是本质上架构设计的不同。头部的L4公司已经淌过了近10年的坑,在无人驾驶落地上将持续领先。
目前L4 Robotaxi已经可以在国内的部分城市在特定区域,可以开展无人化的商业运营,下一阶段的难点是:成本下降和规模部署。
好消息是:
成本下降,已经点连成线。依托辅助驾驶的大规模量产,在关键零部件上激光雷达、大算力芯片的成本已经大幅下降。以百度为例,第六代量产无人车Apollo RT6成本仅为25万元,相当于一辆普通新能源汽车的价格。
法律法规也逐渐开放。重庆、武汉落地无人化试点,北京在本月开放了前排无人,深圳试点L3立法,广深发放首批城市高精地图许可。
什么样的公司能迎来无人驾驶落地的胜利?要有雄厚的资金资源实力持续投入;体系化的AI能力积累;工程能力与对汽车安全的深入理解。
过去一年,百度萝卜快跑的运营范围遍及北京、上海、重庆、武汉等10多个城市,超过了Waymo等厂商,成为全球最大的自动驾驶出行服务提供商。
萝卜快跑累计订单量达到140万单,上个季度公众累计乘车47.4万次;在部分地区,单车每日完成15次以上出行服务,已经与传统网约车服务相当接近。
无人驾驶在技术研发上遇到的问题越来越难,头部公司也越发看到胜利的曙光。
来源:第一电动网
作者:HiEV
本文地址:https://www.d1ev.com/kol/190352
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!







 京公网安备
11010502033163号
京公网安备
11010502033163号