3月17日,在GTC 2026大会上,理想汽车发布下一代
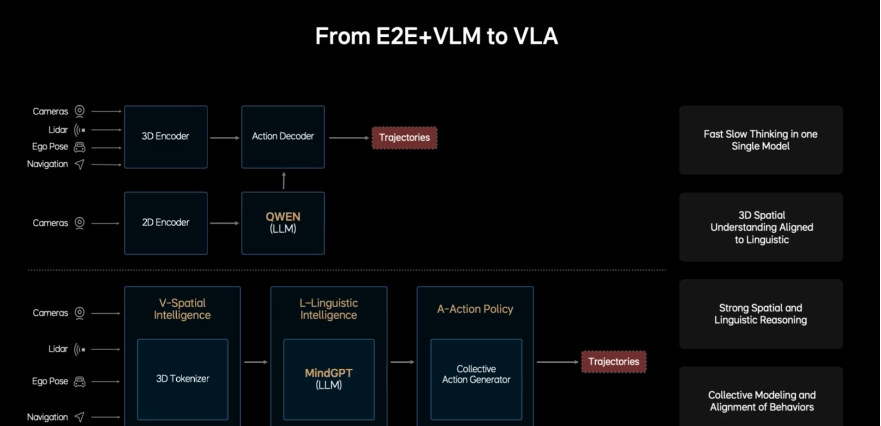
自动驾驶基础模型 MindVLA-o1,该模型通过统一视觉、语言与动作(VLA)的多模态架构,让自动驾驶具备更强的空间理解、推理决策与行为执行能力,标志着自动驾驶技术从单一感知与规则驱动,向具备思考与预测能力的智能体演进。
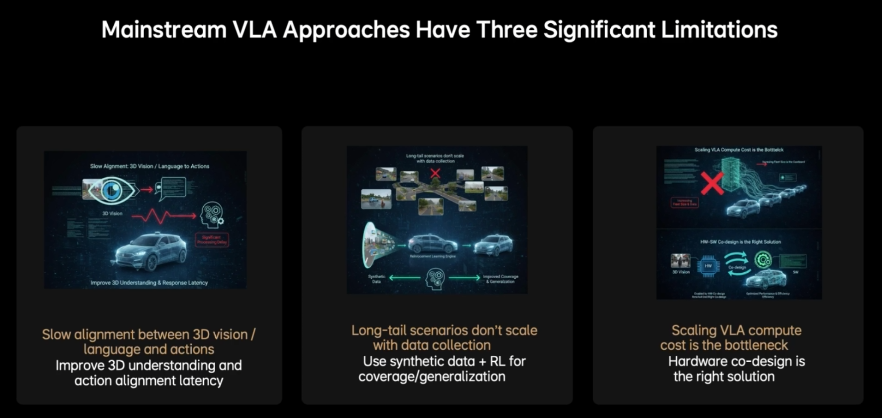
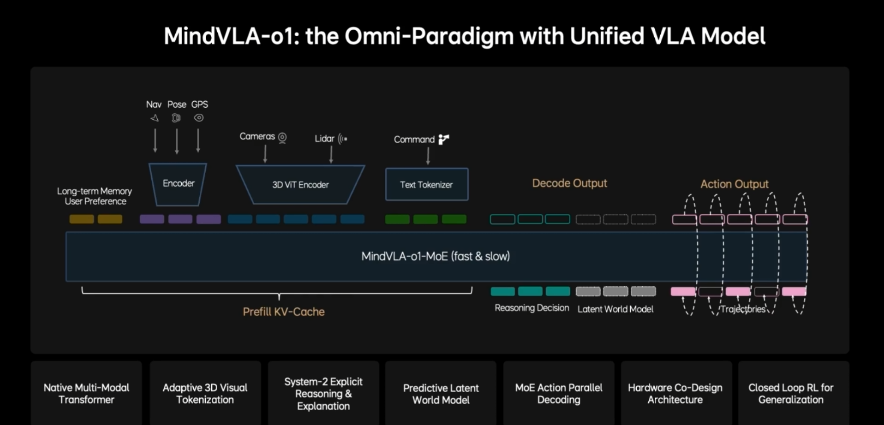
MindVLA-o1围绕五大技术创新构建:3D空间理解、多模态思考、统一行为生成、闭环强化学习以及软硬件协同设计。在感知层面,通过视觉模型结合激光雷达实现高质量三维环境理解;在决策层面引入世界模型,可在隐空间中预测未来场景变化并进行推理;在执行层面则通过统一行为生成机制直接生成驾驶轨迹,实现更稳定高效的驾驶决策。
为支持模型持续进化,理想还构建了完整的AI框架,包括 MindData(数据引擎)、MindVLA-o1(基础模型)、MindSim(世界模型仿真系统)以及RL Infra(强化学习基础设施),形成从数据、训练到仿真的闭环体系,使自动驾驶能够在真实与模拟环境中不断学习与优化。
理想汽车认为,汽车本质是“最大的机器人”,自动驾驶只是物理AI的起点。未来,这套VLA基础模型不仅可用于智能汽车,也有潜力扩展到机器人及其他物理系统,推动具身智能通用模型的发展。
来源:一电快讯
返回第一电动网首页 >
以上内容由AI创作,如有问题请联系admin#d1ev.com(#替换成@)沟通,AI创作内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网或AI创作,如有侵权请联系邮件删除。







 京公网安备
11010502033163号
京公网安备
11010502033163号