1月26日,国家地方共建人形机器人创新中心联合上海纬钛科技有限公司发布了全球首个最大规模的跨本体视触觉多模态数据集——白虎-VTouch。该数据集包含视触觉传感器数据、RGB-D数据、关节位姿数据等,涵盖轮臂机器人、双足机器人、手持智能终端等本体构型,数据集规模超60000分钟,第一批6000分钟开源数据已上线OpenLoong开源社区。
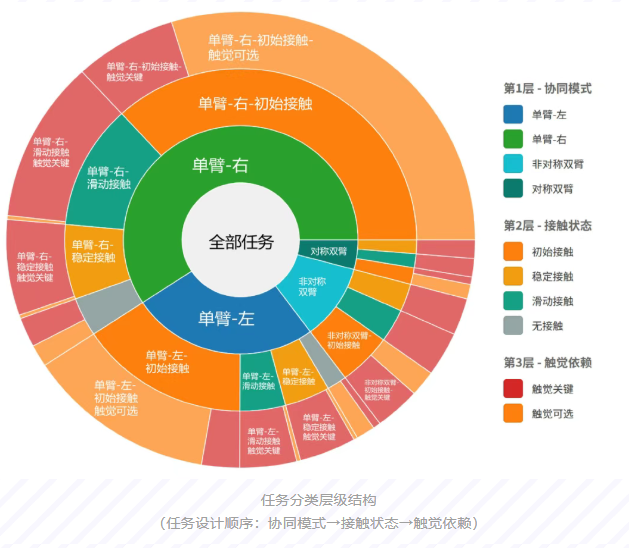
白虎-VTouch数据集首创跨本体视触觉多模态真实交互数据采集新范式,系统破解具身智能机器人在真实物理交互数据稀缺、高保真触觉信息不足、跨机器人本体泛化能力弱三大核心瓶颈。数据集覆盖家居家政、工业制造、餐饮服务、特种作业等4大类真实场景、380+任务类型、100+原子技能、500+真实物品,突破传统“单任务人工采集”的低效模式,提出“矩阵式”任务构建新范式。
国地中心联合纬钛机器人在视触觉传感器数采适配、任务构建、数据审核等方面开展了系统工作。纬钛机器人起源于美国麻省理工学院,创始人李瑞博士与导师EdwardAdelson教授共同开创了视触觉技术路线,发明了全球第一款分辨率超越人类手指的视触觉传感器GelSight。白虎-VTouch数据集的使用说明、相关研究成果Pre-print预印本也将陆续发布。

来源:一电快讯
返回第一电动网首页 >
以上内容由AI创作,如有问题请联系admin#d1ev.com(#替换成@)沟通,AI创作内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网或AI创作,如有侵权请联系邮件删除。







 京公网安备
11010502033163号
京公网安备
11010502033163号