盖世汽车获悉,5月13日,小米正式发布Xiaomi OneVL,这是一个面向自动驾驶的一步式潜空间语言视觉推理框架。该框架首次将VLA模型、世界模型与潜空间推理等多条技术路线整合到同一体系下,在保持强大推理能力的同时,显著提升了推理速度与精度。
图片来源:@小米技术
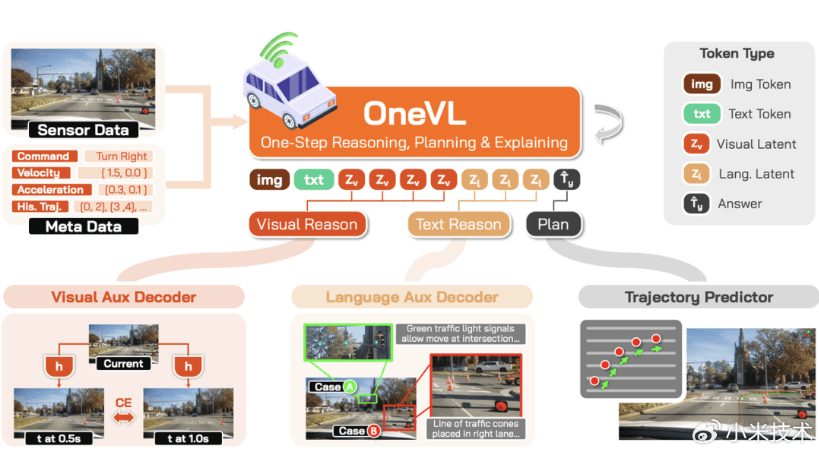
据介绍,Xiaomi OneVL采用了“语言推理+视觉未来预测”的双重监督机制,将可解释性与世界模型的未来预测能力共同融入潜空间推理过程。
其核心思路在于:自动驾驶所需压缩的信息并非仅限于语言层面的推理,而是对未来视觉世界变化的整体理解。驾驶决策更多依赖于车辆运动、道路几何、障碍物演变等时空因果关系,单纯压缩语言可能会丢失关键结构信息,而压缩对未来视觉画面的预测则能更有效地保留影响驾驶结果的核心要素。
基于这一思路,小米提出了三项关键技术,核心思路是让模型在内部以自身“语言”进行思考,学习预测未来视觉画面,并将整个推理链条压缩至一步完成。在多个主流推理与规划基准测试中,Xiaomi OneVL全面刷新了现有潜空间推理方法的性能记录,其精度超越显式思维链(CoT)方法,速度则与“仅答案”预测模式相当。
小米集团雷军表示,该模型及代码将全面开源,欢迎全球开发者与研究人员共同参与,推动自动驾驶大模型的进一步发展。
来源:第一电动网
作者:盖世汽车
本文地址:https://www.d1ev.com/news/qiye/299084
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号