
CIDI自动驾驶重卡
日常生活中的汽车都是依靠驾驶员来操作前行的,在驾驶过程中我们完全不清楚视线范围以外的信息,遇到紧急情况不能提前预知。记得小时候看科幻电影《我,机器人》时,就深深的被影片中主人公“一辆会自动驾驶的车”所吸引,崇拜电影中拥有的超能力。它会主动加速减速避让来往的车辆并且提前预知前方道路的交通情况。
当我们还沉浸在科幻电影镜头时,科幻变为现实,随着自动驾驶技术的日益成熟,它将是未来汽车发展的必然趋势。目前,各大车企和涉及自动驾驶领域的科技公司都在为研发自动驾驶技术而努力。CIDI就是一家专业研发智能驾驶技术的公司并已成功的运用到重卡、专用车及车路协同领域上。
我们先来了解一下自动驾驶,自动驾驶级别分为5级,当达到第5级时也就是我们俗称的全自动驾驶, 而这些并不是真正意义上的自动驾驶。那么真正的自动驾驶是什么呢?应该具备哪几个必要条件?

CIDI自动驾驶测试场(高速路段)
目前的半自动驾驶,传感器是车辆必不可少的,同时在未来的自动驾驶车辆上,这也是最基础的。车辆的雷达可以划分为三种声波雷达、光波雷达还有毫米波雷达可以检测周围的环境。同时车辆的摄像头、扫描仪等构成了车辆的基础探测系统。
想要实现车辆的自动驾驶,高精度地图自然是必不可少的。就目前的地图来说,可以帮助驾驶员规划路线,同时还可以根据驾驶员的喜好来选择,比如说躲避拥堵,高速优先,时间最短等,同时地图还可以显示出拥堵情况。
然而这些信息并不能很好的支持自动驾驶车辆的使用,还要更加多元化的信息,比如实时的道路信息以及红绿灯的时间间隔等。
车路协同
除了上述所说的技术可以实现自动驾驶外,要是想将自动驾驶提高一个级别,就要用到车路协同系统了。车路协同系统即IVICS(Intelligent Vehicle Infrastructure Cooperative Systems),简称车路协同系统,是未来智能交通系统(ITS)的发展方向。其采用的是无线通信、互联网、传感探测等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人-车-路的有效协同,保证交通安全,提高通行效率。
车路协同的技术指标有三点,一是强调人-车-路系统协同,二是强调区域大规模联网联控,三是强调利用多模式交通网络与信息交互。这项技术是信息技术与汽车和交通两大行业相融合的结果,那么这项技术将为我们带来哪些便利呢?
车路协同系统中的碰撞预警功能会提前告知“哪些车辆存在潜在的碰撞危险”,预估出潜在安全隐患,提醒驾驶员提前变道及时避让。虚拟路牌则会告知路途中标注性信息,可以提前告知驾驶员注意落石或急转弯等。还有路口红绿灯状况告知提醒,超视距感知系统对路况、车况的实时获取,预先将看不到的路障信息发送给汽车,提醒驾驶员注意换道或避让。随着自动驾驶领域不断开发,有很多涉及自动驾驶系统技术的企业都纷纷加入其中。
近日,钛媒体参观了长沙自动驾驶研究院(以下简称“CIDI”)。它是一家专业研发智能驾驶技术的公司,其利用多种传感器、高精度定位、车路数据互联与共享,来实现自动驾驶,并将自动驾驶的研发与落地方向定位在重卡、专用车及车路协同领域。

自动驾驶重卡试乘体验
目前已经在重卡上实现了自动驾驶功能。

登上卡车,和驾驶员师傅打了一声招呼,师傅笑着说:“我现在叫安全员了,科技发展的太快司机要失业了”。坐稳后,卡车缓缓的驶上高速测试道路,逐渐开始提速,屏幕显示时速是103KM/H了,当视线里出现其他车辆后,明显的可以感觉卡车在减速的同时开始变道了,同车的技术专家告诉钛媒体,其实车辆早就知道前方道路的信息,并且计算出前方行驶车辆的时速,检测其车身姿态有没有变道意图,所以卡车在刹车的同时完成变道,进行避让。

车速超过100km/h
那么CIDI是如何实现重卡自动驾驶的呢?它并不是依靠单一的自动驾驶系统(前文应具备的条件外),而是依托智能网联道路管理系统(CRSS)来完成的,我们可以把CRSS简单的看成升级版的车路协同系统。该系统根据不同应用场景方案提供了四层计算架构:车端计算、路侧边缘计算、中心云计算、移动端计算。
CRSS主要由智能网联路侧单元、边缘计算单元、路侧传感器组成,系统集成了感知、高精度定位、V2X通信等功能。车内数据传输主要由车载单元(OBU)与手机APP组成,车载终端主要集成了V2X通信、V2X 算法决策、APP终端显示、自动驾驶控制等功能。
通过车路协同系统,实现自动掉头
“无人驾驶的最后1%是非常困难的,不解决就落不了地。”马潍博士曾说过这样的一句话。和很多车企单一的去研发L3或L4不同的是,CIDI是以L4技术出发做能落地的产品。
车联网是解决无人驾驶最后1%的关键。虽然车联网概念炒了很多年,但实际上低延时的车联网目前做得还是非常少。传统车联网往往是通过在车辆上装载4G通信模块,实现车辆运行状况的反馈,这样做数据传输相对慢,实时性比较差。
CIDI的车联网解决方案是以低迟延通信解决最后1%的无法预料的问题,无人化侧重特殊场景的应用,如园区、矿场等。其涉及核心技术包含多重传感器融合、深度学习、自主决策、高效计算机、高精度定位、V2V及V2X车联网来完成最后的1%。

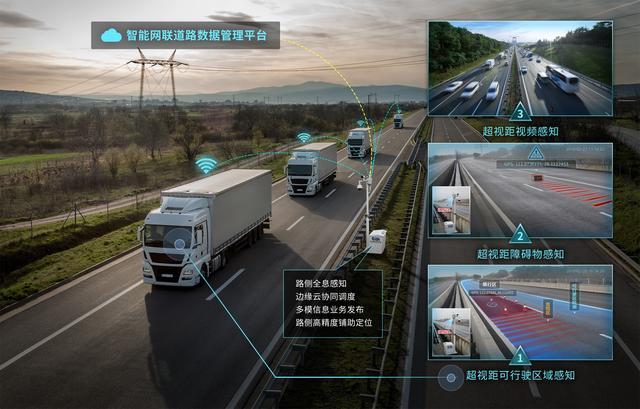
智能网联道路管理系统CRSS
在高速场景中因车速较快,车辆所需的安全距离较远,而车载端传感器极限感知能力只有100到200米,在某些车辆或场景中,无法满足其安全性。此时,沿线部署的CRSS便可通过其超视距感知能力,有效地增强自动驾驶安全性。超视距感知能力包括以下三个方面:
超视距障碍物检测:视距范围以外的道路上存在障碍物时,CRSS能够在驾驶员视距范围之外提前感知到结果并广播给接近该位置的车辆,提醒其提前决策。
超视距可行驶区域检测:为应对道路施工、路面坑洼、交通事故等特殊事件的发生,道路的可行驶区域也将实时发生变化。此时,若依照车内保存的历史地图进行自驾行驶,容易发生交通事故。CRSS提前感知这个区域并广播给接近的自动驾驶车辆,提醒其提前变道。
超视距视频感知:CRSS将采集的路侧视频数据通过V2I传给自动驾驶车辆的感知层进行决策分析,从而将自动驾驶车辆感知能力拓展到1km左右,极大地提升了高速自动驾驶的安全性。
总结
通过一天短暂的试乘体验后,简单总结一下,单靠车辆智能化不能完全实现L4级别的自动驾驶,而将车辆和路面结合到一起后进行数据共享和传输这样就做到CIDI主打的研发理念车路协同,这样就很轻松实现车辆的自动驾驶。
如今的车路协同是智能化、数据化、互联互通的车、路、交通环境的整合。在物联网发展趋势下,这也正是自动驾驶和未来交通所要到达的场景。CIDI依靠多重传感器的融合、深度学习、自主决策、高效计算、高精度定位、V2V及V2X车联网实现了车路协同下的自动驾驶。现实中自动驾驶的运用意义深远,但是车路协同的自动驾驶还需要更多的经验和摸索。
来源:钛媒体
本文地址:https://www.d1ev.com/news/pinglun/88114
以上内容转载自钛媒体,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号