9月20日,由智东西联合CAPE、极果主办的GTIC 2018全球智能汽车供应链创新峰会在重庆召开,大会邀请到来自学术界、整车企业、互联网公司、汽车零部件厂商、电信运营商、自动驾驶新兴公司、车联网企业等智能汽车供应链各领域核心公司30余位专家、高管一同登台,分享对智能汽车最前沿的见解。
▲吴甘沙在峰会现场演讲
驭势科技联合创始人、CEO吴甘沙在大会发表了题为《开放道路L4的长征》的主题演讲,就开放道路L4级自动驾驶技术面临的3大挑战、驭势科技在技术落地方面的探索经验,以及驭势科技的发展策略等问题进行了分享。
吴甘沙表示,驭势科技定位于自动驾驶领域的Tier 0.5级供应商,2025年要实现开放道路的L4级自动驾驶技术。在L4级系统基础上,其研发的L3级自动驾驶系统目标是要实现收费站到收费站的自动驾驶,目前已经完成了大量路测,AVP自动代客泊车技术也将在本月交付客户。
2025年剑指开放道路L4
演讲伊始,吴甘沙以Waymo的测试数据为例,表明开放道路L4级自动驾驶技术难度极高。
在美国,人类驾驶员每16.5万英里出一次普通事故,每9400万英里出一次致命事故。但是目前全球技术最好的Waymo目前每5596英里就需要一次人工干预,否则就会出事故,说明目前的自动驾驶技术离普通人类驾驶员还有很远的距离。
与此同时,还需要注意,Waymo在美国亚利桑那州凤凰城的路测环境较好,车少人少,并且还都遵守交通规矩。而在中国,开放道路复杂度高、地面规整度低,还存在大量人车混流、电动车乱行、加塞逆行等现象。
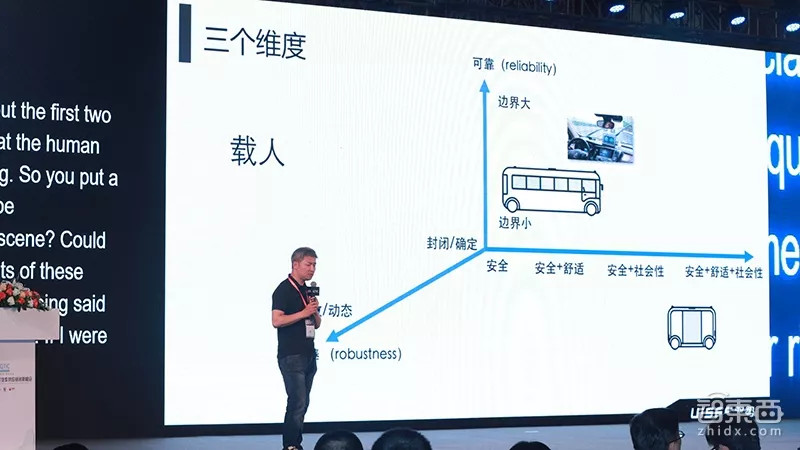
毫无疑问,在中国开放道路上实现L4级自动驾驶更加困难。吴甘沙将其面临的挑战分为可靠性、鲁棒性、安全/舒适/社会性三个维度。
即使挑战重重,吴甘沙称驭势科技还是选择2025年剑指(落地)开放道路L4级自动驾驶技术。
吴甘沙表示,驭势科技将从最高标准(开放道路L4)进行技术研发,而在进行商业落地时,以自己的L4级技术为基础,降维到目前几个高频、刚需的量产场景进行商用,即沿途下蛋,而不是为了一时的盈利,而去选择其他方向进行技术研发,从而影响自己的研发主线。
驭势科技的技术落地探索
虽然开放道路的L4级自动驾驶技术离量产落地还有距离,但是目前自动驾驶技术已经在载人和载物两个方向上的一些细分场景进行了落地尝试。
载人方向主要包括:最后3公里的微循环车、(L4级)AVP自动代客泊车系统、(L3级)高速公路自动驾驶、BRT城市快速公交等。载物方向主要包括:高速公路物流卡车、低速物流车、低速环卫车等。

▲驭势科技在雷雨天气测试自动驾驶技术
吴甘沙认为,上述不同细分场景在可靠性、鲁棒性、安全/舒适/社会性三个维度上面临着不同的挑战。例如载人车辆比载物车辆要多考虑舒适性、开放道路运行的自动驾驶车辆比封闭场景车辆要多考虑社会性(即不影响他人)和鲁棒性等。
基于不同场景面临的挑战不同,驭势科技也选择了一些场景进行技术落地探索。
载物方向,驭势科技目前跟全球排名前三的国际机场达成了合作,在停机坪上部署有无人驾驶的电动物流拖车,帮助飞机运送行李和货物。
载人方向,其研发的低速接驳车/微循环车已经在一些科技园区、北京房山5G自动驾驶测试区、杭州来福士商场地库等地投入试运营,同时其也在与整车企业就AVP自动代客泊车技术和L3级高速公路自动驾驶技术进行研发测试。
 ▲驭势科技AVP技术演示
▲驭势科技AVP技术演示
吴甘沙表示,纯粹的末端自动驾驶接驳车辆暂时还达不到大规模量产程度,但是像BRT快速公交、最后三公里的微循环车、面向乘用车的L2/L3级自动驾驶技术则更具量产机会。
吴甘沙在现场介绍,其L3级自动驾驶技术目标是要实现ETC到ETC(即完成收费站到收费站的自动驾驶),目前已经完成大量路测,每次拉练行驶距离都达到数千公里。
AVP自动代客泊车技术10月份交付客户,跟主机厂、出行服务商一起进行运营。具备两种模式,一种是学习固定车位的停车,不需要高精地图训练几天即可学会固定路线停车。另一种是公共停车场,入场后停车场会分配车位,车辆依靠高精地图自行停车。
此外,驭势科技还在跟酒店等伙伴合作,测试分时租赁车辆在酒店大堂和停车场的自动取停车技术。
四种方式教会无人车处理新情况
“成人考驾照的时候已经拥有了18年的社会阅历,但是无人车是没有这一块的积累。”吴甘沙讲到。
在他看来,面向开放道路的L4级自动驾驶技术即意味着无人车上路后需要面临很多它没有见过的新情况和新东西,这就为技术研发提出了新的要求。
为此,驭势科技正在跟很多国内外的科研机构进行联合研发,探索适应开放、动态和不确定环境的算法,包括:
1、让无人车具有人一样的知识和常识。
2、让无人车具备模仿学习和强化学习能力,像人一样能够孰能生巧,越开越好。
3、让无人车具备因果推理能力,碰见没有见到过的情况,能够推理去找到解法。
4、让无人车具备迁移学习的能力,能够举一反三,实现触类旁通。例如在无人车在仿真中学到的东西,迁移到实际场景中去。
在系统层面,驭势科技也研发了车规级、全功能的多域控制器(计算中枢),整合有AI控制器、定位控制器、线控底盘控制器、V2X/远程控制器和黑匣子5大模块。
在此基础上还可以对其进行定制,例如有些车辆不需要RTK或高精定位支持,就可以拿掉定位控制器模块。
软件层面,驭势科技加上了大量的冗余系统,例如实时电子围栏、Fail-Operation能力、远程监控、全系统冗余、信息安全等等。
吴甘沙在现场介绍,驭势科技的多域控制器已经发展到了第二代,可以隐藏在座椅下方布置,集成度高,可管理性强。
定位Tier0.5 打造自动驾驶“中场发动机”
吴甘沙在现场讲到,传统车企现在也在求变,其正在从客户思维变成用户四维、从产品思维变成服务和平台思维,驭势科技有能力与传统车企进行协同创新,应对变化。
他表示驭势科技定位于Tier0.5级供应商,要做无人驾驶生态中的“中场发动机”,即通过1+1+X——车规级车脑+云脑,来附能不同的主机厂,让其在无人公交、高速公路、工厂、机场等不同的场景进行技术落地(X)。
那么驭势科技如何附能呢?总结可以分为四大招式。
1、在研发层面与主机厂共享代码与数据。
2、帮助主机厂和其他合作伙伴,建立一个创新的运营运维体系等。
例如分时租赁企业需要进行大量车辆运维工作,驭势科技就与之一起研发了一套远程监控系统,在自动驾驶系统无法工作时对车辆进行遥控;与分时租赁公司一同研发编队调度系统,让车辆在不同网点之间自主流动;提升自动泊车精度,实现高密度停车等。
3、驭势科技提供有可以实现虚拟与现实结合的仿真系统,跟主机厂一起进行技术验证。
4、驭势科技可以通过自动驾驶的“影子模式”,积累测试数据促进技术研发。
吴甘沙引用的兰德公司的数据显示,无人车需要达到110亿英里的运行数据,才能在统计学上证明无人车达到人类司机的水平。
这对测试车队规模提出了极高的要求,目前唯一的解决办法就是在大量量产车上使用“影子模式”系统,即在搭载有自动驾驶系统的车辆上部署两套算法,在人开的时候,系统在背后虚拟运行一套自动驾驶算法,再与人类的驾驶结果进行比对来提升自己的技术。
不过吴甘沙也指出,影子模式虽好,但是目前也面临数据隐私、传输、传感器选择以及决策判断和抗噪音等问题挑战。
来源:车东西
作者:晓寒
本文地址:https://www.d1ev.com/news/jishu/77916
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号