中国互联网巨头百度的研究人员最近研发出一种自动调谐框架,专为基于阿波罗自动驾驶平台、由数据驱动的自动驾驶车辆设计。该框架在arXiv网站发布,包括新的强化学习算法和离线培训策略,以及自动收集和标记数据的方法。

用于自动驾驶的路径规划器(motion planner)是一个系统,专为目的地设计安全且舒适的路径。设计并优化此类系统,使它们在不同的驾驶条件下都能表现良好是一项艰巨的任务,目前,全球有几家公司的研究人员们都在努力解决此问题。
进行该项研究的一名人员表示:“自动驾驶汽车的路径规划存在许多具有挑战性的问题,主要挑战之一是必须处理成千上万的不同场景。通常,我们会定义一个奖励/成本功能调谐,可以适应不同场景的差异。但是,此任务非常艰巨。”
一般来说,奖励-成本功能调谐需要代替研究人员进行大量工作,同时在模拟和道路测试中需要花费大量资源和时间。此外,随着时间的推移,环境会发生显著变化,驾驶条件也会变得越来越复杂,调谐路径规划器的性能变得越来越困难。
该研究人员表示:“为了系统地解决该问题,我们研发了一个基于Apollo自动驾驶框架、由数据驱动的自动调谐框架。自动调谐就是从人类的驾驶数据中学习参数。例如,我们想要从数据中了解人类驾驶员如何在遇到障碍物时,平衡速度和进行便利驾驶”。
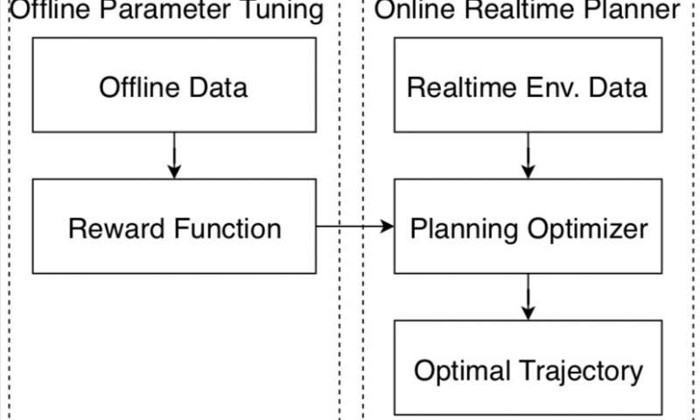
百度研发的自动调谐框架包括新强化学习算法,可以从数据中学习,并随着时间推移改善其性能。与大多数的逆强化学习算法相比,该框架可有效应用于不同驾驶场景。此外,该框架还包括离线培训策略,为研究人员在公共道路上测试自动驾驶汽车之前调整参数提供了一种安全的方法。此外,它还可从专业驾驶员和环境信息中收集数据,自动标记数据,以便通过强化学习算法分析对其进行分析。
研究人员评估了一个路径规划器,在模拟和公共道路测试中都使用其框架对该路径规划器进行了调整。与现有方法相比,数据驱动的方法能够更好地适应不同的驾驶场景,在各种条件下的表现保持良好。
来源:盖世汽车
本文地址:https://www.d1ev.com/news/jishu/75910
以上内容转载自盖世汽车,目的在于传播更多信息,如有侵仅请联系admin#d1ev.com(#替换成@)删除,转载内容并不代表第一电动网(www.d1ev.com)立场。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!

 京公网安备
11010502033163号
京公网安备
11010502033163号