自动驾驶行业方兴未艾,从「终局思维」出发,玩家们应该如何在行业寻找定位?
以特斯拉坚持的 BEV+transformer 技术路线的出现为标志,自动驾驶下一幕已经来临。
行业内不少人开始思考,自动驾驶企业应该具备什么样的能力?
有观点认为,坚持感知自研和数据驱动才是通往终局的有效路径。
感知自研:意味着掌握产品定义能力,能够从底层逻辑出发思考行业走向——行业前 5% 玩家有志于此;
数据驱动:打造闭环数据系统、盘活数据资源——L2 的装车率已经超过 50%,而目前大量装配 L2 系统的车上的数据价值被浪费掉了。
城市 NOA,可以视为自动驾驶 3.0 时代的首个大规模「会战」,也正在成为自动驾驶的第二增长曲线。
此前,以实现 L4级自动驾驶为目标的企业,已经开始降维切入低阶自动驾驶,跨越式路线沦为边缘路线。
随着城市 NOA 的流行,以场景为核心,自动驾驶的渐进式或跨越式路线玩家,都将挣脱 ADAS 场景变现日益卷化的竞争态势,在一个新兴的蓝海市场(城市 NOA 场景)搏击,以实现更广阔商业价值,迎接城市泛化场景自动驾驶的最终落地
新一轮「开城潮」将至,新思路带来新方案,一批「黑马」玩家是否有机会杀出重围?
01 逐鹿 BEV 自动驾驶时代,谁有机会拿到入场券?
在《笑傲江湖》里,华山派武学分「剑、气」两大宗派。
其中剑宗功夫易于速成,见效极快:
大家都练十年,定是剑宗占上风;
各练二十年,那是各擅胜场,难分上下;
要到二十年之后,练气宗功夫的才渐渐的越来越强;
而到了第三十年时,练剑宗功夫的便再也不能望气宗之项背了。
像气宗以慢功夫熬出来的,在自动驾驶行业也有一路高手:坚持长期主义,经过一番苦功夫,迎接自动驾驶终局之战。
若以 2004 年的第一届 DARPA 挑战赛为起点,自动驾驶技术走过了 20 年。
从硬件主导的 1.0 阶段,到软件主导的 2.0 阶段,如今自动驾驶正在进入「BEV+Transformer」大模型统御的 3.0 阶段。
1.0 阶段,主导者主要是从 DARPA 挑战赛走出来的一批美国科技公司,如 Waymo、Cruise、Aurora、Argo AI、Nuro 等。这一阶段使用人工规则的方式来实现车辆控制,产品几乎标配价格高昂的车载激光雷达。
2.0 阶段,在大算力支持下的以 CNN(卷积神经网络)技术为主导的深度学习路线登场。2014 年,特斯拉推出 Autopilot 智能驾驶系统;2015 年,英伟达进军车载计算平台领域,发起算力革命。
3.0 阶段,以特斯拉 2021 年在 AI Day 上提出了 BEV+transformer 的技术路线为标志,以大数据、大模型为特征,数据驱动的自动驾驶 3.0 时代开启。
智驾科技 MAXIEYE 创始人周圣砚认为,几乎所有创业公司都号称自己已经走入 3.0,否则就融不到资。但真正能够进入的,中国可能不超过 5 家。在 1.0、2.0 时代大量积累感知技术,并实现量产交付的玩家才能拿到 3.0 时代的入场券。
BEV+transformer 大模型淘汰上一代基于规则的自动驾驶算法,已经成为大势所趋。
那么,具备什么样的条件的公司,才有资格进入自动驾驶 3.0 终局之战?
在周圣砚看来,企业要进入自动驾驶 3.0 需要 6 个核心能力:
一是,在 2.0 时代的佼佼者:在感知方面已经实现量产,感受过 CNN 技术的天花板。
二是,打造 BEV+transformer 的技术架构。比如真值系统的创建、4D 的场景还原。
三是,重感知,轻地图,要追求「目中有图」,即 BEV 模型做到高精度、长视距。
四是,在商业模式上,实现软硬解耦。可以实现平台层、应用层功能在不同车型与硬件平台上的复用,解决效率和成本问题以配合车厂的差异化战略。
五是,整车架构要向行泊一体转。共享数据和算法以提升感知能力。
六是,数据驱动。打通 L2 的数据闭环,让 L2 为更高阶的 L2+提供数据支撑。
有行业玩家已经陆续打出了自动驾驶 3.0 时代的旗帜。
特斯拉成为率先进入自动驾驶 3.0 时代的代表。
即将上线的全新自动驾驶系统 FSD V12,消除了超过 30 万行此前控制车辆 FSD 功能的代码,进一步依赖神经网络。
马斯克描述其为「端到端人工智能」,采用「视觉输入、控制输出」的方法。
小鹏 XNGP 智驾辅助系统,采用轻地图方案,不受限于高精地图的使用范围、更新时效,手动驾驶一次后可生成记忆地图。
自动驾驶 3.0 时代的「序章」已经奏响。
在技术上,自动驾驶行业追求的不再是算法的简单叠加、传感器的堆料,而是产业链底层技术的重构。
在产品上,低阶(L2)正在向高阶(L3、L4)进军;在场景上,城市 NOA、无图 NOA 成为主流。
城市 NOA,成为自动驾驶当下最火热的关键词,堪称自动驾驶进入 3.0 时代的首场「大会战」。
车企、自动驾驶企业纷纷出招。
数据显示,小鹏新 G9 高阶智能驾驶选配比例高达 80%。问界新 M7 上市两个半月内,累计大定已突破 10 万辆,其中智驾版占比达 60%,城区 NCA 选装率达 75%。
以小鹏新 G9、问界新 M7 为代表,舒适、便利、安全的体验颠覆了消费者对高速 NOA 刻板印象的认知,高阶智驾买单意愿逐渐加强,市场逻辑正在改变。
用户需求仍然掌握着自动驾驶落地进程的「方向盘」。
2023 年年初,麦肯锡的一份调研显示:
电动汽车消费者最关心的是电池续航里程和充电时间,其次是车辆驾驶表现、用车成本等,自动驾驶功能排在第九。
而某车企内部调研最新数据显示,自动驾驶对消费者购车决策的影响力已经升至第 4 位。
这意味着,L2、L2+、L2++逐渐进化的渐进式发展之路,自动驾驶从低阶智能驾驶到高阶智能驾驶的跃迁的前景更加明朗。
一个值得思考的命题摆在眼前:当完全无人自动驾驶,哪家自动驾驶企业能够占得胜负手?
在 BEV+transformer 主导的自动驾驶 3.0 时代,坚持感知自研和数据驱动,或许才是通往终局的有效路径。
02 以「快」取胜,推动城市 NOA 加速落地
以华为、小鹏为代表的头部玩家在算法、算力、数据方面的积累,随着城市 NOA 的落地,让消费者率先体验到最前沿的自动驾驶技术,在宣传上也形成指数级的扩散效应。
这为其他玩家降低了教育用户的门槛,但随之而来的是:
一方面,水大鱼大,大量自动驾驶公司涌入行业。
另一方面,大浪淘沙,自动驾驶公司正在出现了 95% VS 5% 的局面:
占多数的前者是尚未构建起核心技术壁垒,找一家上游企业采购一套拥有核心技术,加上 ODM 公司的硬件,只做工程调试环节;
后者则是实现了技术和方法论闭环,能够去定义产品。
从自动驾驶技术角度来说,在成本、高性能、安全三者之间寻找平衡,很难做出本质化的差异。
大部分厂商在基于成熟的芯片、绑定视觉算法打造 L2 方案,市面上出现了产品「同质化」严重的现象。
BEV+transformer 的技术天花板很高,打破了过往基于规则的算法,把自动驾驶各个核心要素都深度学习化了。它能重构空间和时序,完成「时空合一」的端到端自动驾驶系统。
按照周圣砚的话说,这给了自动驾驶向上突围一把钥匙。
只有掌握核心技术栈自研,在感知、规划、决策和控制上做出独特性,才能够真的可以去定义更多产品,重构刷新产品体验,打破「同质化」现象。
是成为 Leader,还是亦步亦趋的 Follower?两条路出现在自动驾驶企业面前。
11 月 29 日,智驾科技 MAXIEYE 发布了 BEV 平台架构——青云 Hyperspace 和海市 MAXI-DI 数据智能体系。
早在 7 年前,MAXIEYE 成立之初,便走上自研核心栈技术之路。
从 2020 年开始,用 BEV+Transformer 重构了自己的全部技术体系,打造了依托感知技术、真值系统、数据智能和仿真系统形成的整个技术底座「护城河」。
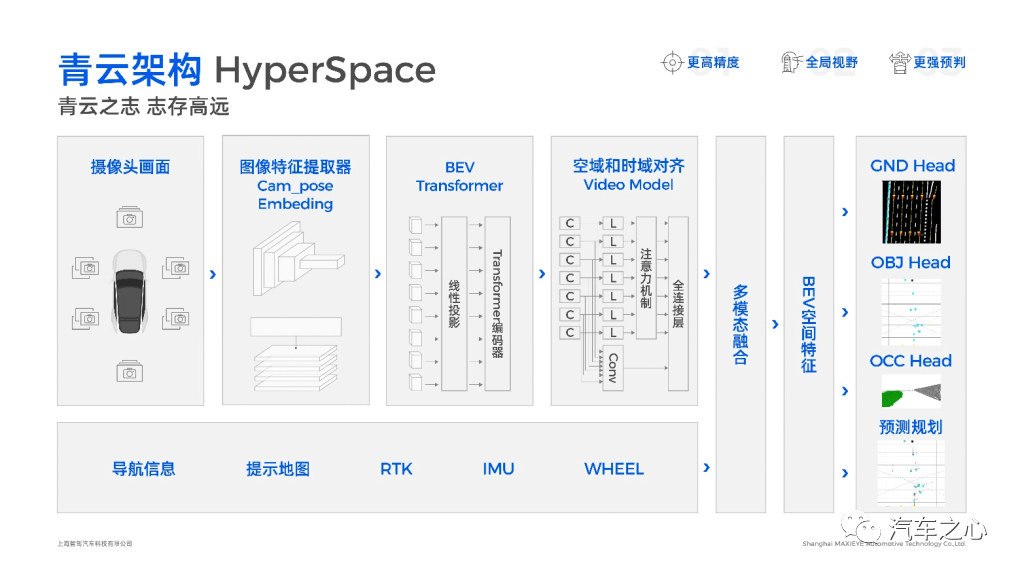
BEV 平台架构「青云 Hyperspace」,采用一站式融合道路拓扑、目标轨迹、占用空间三大网络,直击高阶自动驾驶产品开发需求和场景痛点。
丢掉传统 CNN 图像检测框架的包袱,通过 BEV 新范式的崭新理解,对底层技术重构的跨越式思想,打造了通向自动驾驶下一幕的差异化路径。
值得注意的是,青云 Hyperspace 的一大独特性在于能实现「目中有图」——精度高、视距长:
BEV 模型横向精度达到 5 厘米,纵向精度在 100 米范围内达到 10 厘米;
视距最长可达 150 米。
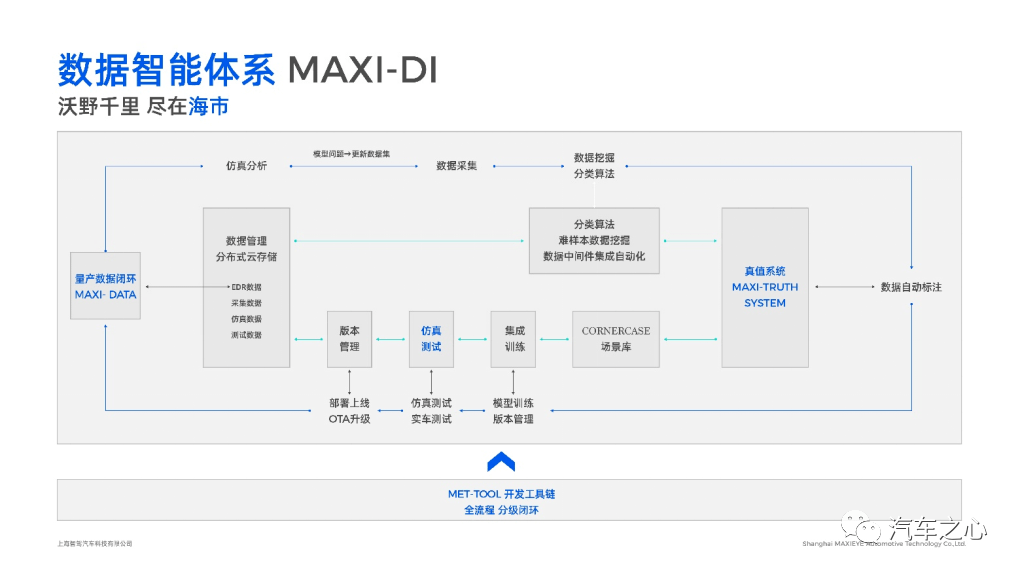
海市 MAXI-DI 数据智能架构,全维覆盖量产数据闭环 MAXI-DATA、真值系统 MAXI-TRUTH SYSTEM、MET-TOOL 全流程闭环测试开发工具链,以及仿真极限场景构建。
只有将技术和方法论做到闭环,走到量产前夜。
自动驾驶行业走到新的阶段,留下来的将是懂感知、懂 BEV 的玩家,接下来比拼的核心是对产品的定义和实现的速度。
而规模化商业落地的节奏,决定一家自动驾驶科技公司能够走多快。
东风汽车技术中心首席总工程师边宁指出:
随着智能电动车的发展,中国车辆开发周期不断压缩,从 60 个月压缩到 48 个月,36 个月,20 个月,12 个月,现在还有人挑战更短,整体效率在不断提升。
在商业模式上,传统高度耦合的软硬件显然限制了产品的迭代。实现软硬解耦,是提升速度的一大利器。
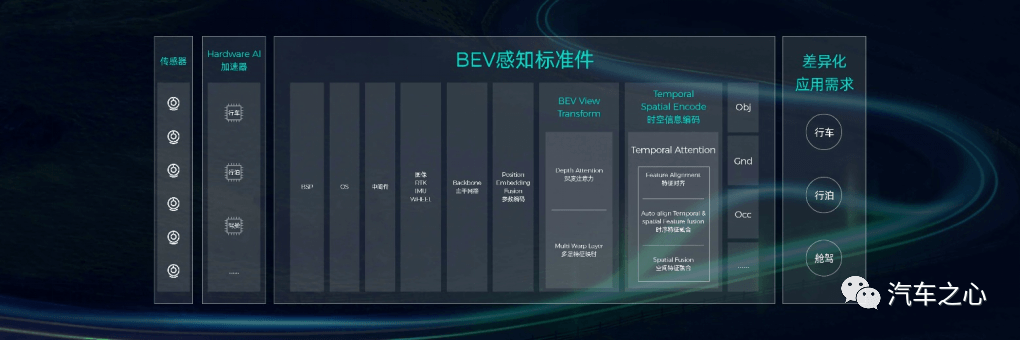
比如,MAXIEYE 于行业首度提出的 BEV 感知标准件,支持软硬解耦,可支持在 6 个月内实现高效跨平台开发需求。
软硬解耦,意味着更加灵活、平台化的开发模式,可以实现标准化工具链、标准化规控接口、标准化 ISP,满足面向不同场景应用的高效跨平台移植,加速高阶智能化产品的应用。
开发工具链的效率,决定了整个系统开发的效率。MAXIEYE 推出的 MET-TOOL 全流程闭环开发工具链,可助力客户量产项目研发效率提高 20 倍,测试效率提升至少 10 倍,缩短项目量产上线周期。
到了 3.0 阶段,一家自动驾驶企业,既要有技术,还要有收入规模,具备独立造血能力;既要有第一曲线,还要有第二曲线。
2023 年,多个汽车品牌先后推出城市 NOA 功能。
11 月 28 日,小鹏城市 NOA 开启全量推送,覆盖 25 城的城市智驾正式开城。
在智己 S7 发布会上,华为宣布年底实现全国都能开的无图方案城市 NCA,覆盖 261 个城市。
大疆车载与宝骏汽车合作,此前宣布年底将提供记忆领航选装,定制通勤路线上实现轻地图的城区 NOA,最长记忆距离可达 100km。
城市 NOA,当属当前智能驾驶最热门的落地场景。
以 MAXIEYE 为代表的自动驾驶解决方案商,开辟了以城市 NOA 主导的第二增长曲线。
所谓「第二增长曲线」,即从 ADAS 的红海市场进入到 ADS(高阶智能驾驶)的蓝海市场。
以实现 L4 级自动驾驶为目标的企业,已经降维切入了 ADAS 市场,下一步瞄准了 ADS 市场——这意味着,跨越式路线沦为边缘路线。
无论是此前的渐进式或跨越式路线玩家,都将挣脱 ADAS 市场日益卷化的竞争态势。
而城市 NOA 普及,意味着汽车能够在更复杂的场景下自主驾驶,向 L3 等级自动驾驶持续推进。
这标志着,汽车智能驾驶真正从高阶辅助驾驶逐步迈向自动驾驶。
03 打造 3.0 时代的「数据闭环」,难点何在?
自动驾驶的 1.0 时代的数据积累在数百公里的水平,2.0 实现了数千公里,3.0 阶段拥有以亿计的数据量已不足为奇。
主流的感知系统网络架构是基于 BEV+Transformer 模型,为了让模型效果得到提升,采用数据闭环来驱动算法迭代,几乎已经被公认为是提升自动驾驶能力的必由之路。
数据驱动,确切来说是 AI 算法和数据共同驱动。AI 算法解决了学习效率,数据解决了学习内容,二者是共生关系。
那么,自动驾驶公司如何获取大量数据?
同济大学教授、汽车安全技术研究所所长朱西产曾指出:
「数据闭环主要作用是解决未知的不安全场景。现在公司需要自己去采集数据,拿来做 AI 的训练以及回放的测试,但是数据采集费用非常高,这个场景库到底要跑多少公里,才能够覆盖全场景呢?我们希望是 10 亿公里,但 1 亿公里的采集费用企业都无法承受,所以我们最终还是要建立用户数据闭环。」
只有基于大规模真实的人机共驾数据的乘用车辅助驾驶,才有能力积累到足够规模、多类型的数据,进而提升模型的泛化能力,实现场景打通的目标。
持续稳定、高质量的场景数据,决定一个自动驾驶科技公司能够走多远。自动驾驶行业必须面临的现实是:真正能够依靠用户数据,规模化量产的数据闭环的企业,仍然少之又少。
与数据获取「难」并存的是,大量数据在被「浪费」。
实际上,L2 的装车率已经超过 50%,这个数据并不低。但是,车企高中低配智驾产品方案缺乏技术平台的连贯性,自动驾驶系统相对割裂。
在注重效率和自动化的前提下,让不同模块之间的集成度增加,数据流转的时效性、数据挖掘的能力才会上去。
因此,打通低阶车和高阶智能驾驶的数据通路,成为自动驾驶公司推动规模化量产数据的新路径。
通过在场景覆盖度更广的量产车上部署数据采集系统,在遇到当前的自动驾驶系统处理不够好的情形时,触发数据回传,以搜集更多 corner case 场景。
照此思路,一些自动驾驶企业试图打通 L2 产品的数据闭环,并且定义很多 L2+场景的触发事件,进一步地把这些场景数据触发回来,用于支撑 L2++的产品开发。
大量有效的数据形成闭环,成为推动城市 NOA 大规模量产的关键一步。
一方面,城市 NOA 存在「开城慢」痛点。
数据显示,截至 2023 年上半年,高阶智驾中国区市场渗透率仅为约 5%,其中城市 NOA 渗透率和使用率占比更低。
另一方面,拥有最显著端上数据优势的整车厂,却在城区 NOA 开发中成为被动的一方。
周圣砚称,「若要使大量数据不被浪费,激发城市 NOA 潜力,应该极致利用当下搭载量最大的 L2 性价比方案、打通 L2 到 L2+系统数据的通路。」
通过设置触发机制,用低阶车的数据建图,高阶车来用图——这是智驾科技 MAXIEYE 提出「记忆共享=城市 NOA」解题思路。
在 MAXIEYE 推出的智能驾驶全系产品中,MAXIPILOT 2.0 Lite 也是行业内唯一支持 BEV 部署的前视一体机高性价比算力平台方案,定位覆盖日常行车 70% 以上场景的千元级别产品。
这意味着,入门级配置即可支持城区建图。
据了解,MAXIEYE 的量产数据闭环系统,包含功能触发、驾驶行为触发、系统触发、感知触发四大模块-30 余种触发机制。目前,已积累超两年前装部署经验,拥有 3 亿公里的场景数据,且已经打通了低阶车和高阶车的数据通路。
这被认为是一条更经济的商业路径,也是通向城市 NOA 高效能开城的路径。
在 BEV+transformer 主导的自动驾驶新时代,坚持感知自研、有能力重构自动驾驶产品的玩家们,以更完善的数据闭环系统,在下一轮的城市 NOA 落地中占得先机。
在未来的终局之战,谁有实力脱颖而出?
一城一地之争,即便决出胜负或许并非最大赢家。坚守正道、脚踏实地,共同迎接自动驾驶的朝阳。
来源:第一电动网
作者:汽车之心
本文地址:https://www.d1ev.com/kol/214216
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!











 京公网安备
11010502033163号
京公网安备
11010502033163号