什么是城市NOA功能?
基于国产芯片的城市NOA功能有看点吗?
国产芯片发展到了什么阶段?
车上配的激光雷达是不是越多越好?
车企常吹的“数据驱动”、“中央计算”
究竟是真是假?
……
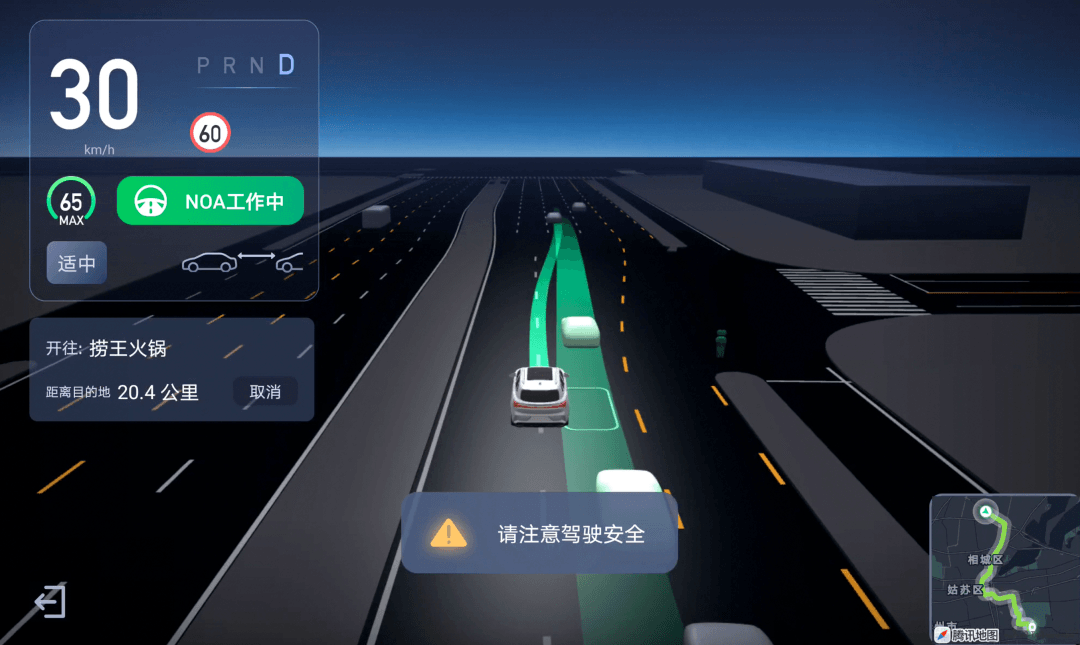
最近,两家中国公司组CP
推出了基于国产芯片的城市领航辅助驾驶功能
表现如何?
先带你感受下
此外
我们还附上了10个技术小科普
它们来自黄畅,是地平线的联创&CTO
以及侯聪,是轻舟智航的联创&CTO
说不定对你研究汽车能有些帮助
采 访全文整理如下:

NO.1 听说量产车上的激光雷达越多越好?
侯聪:理论上是越多越好。
但自动驾驶系统是要考虑到商业化的,所以我们提倡用高性价比的方案。
目前来看,轻舟的城市NOA方案只需要单颗激光雷达就可以实现。
根据传感器分布的特点,我们认为把单颗激光雷达放在车顶位置,就能兼顾前方的感知、侧向加塞车辆的感知,保证安全。
侧后方的区域,视觉感知已经足够用了。再多一颗激光雷达,它的边际收益都会大幅下降。
NO.2 听说国产大算力芯片去年很火?
黄畅:很多公司都在造自动驾驶大算力芯片,这是好事,消费者多了很多选择。
过往我们能够选择的,只有国际上的那几家——英伟达、高通等。但现在,我们芯片公司能够提供更多的方案,给出更多的选择了。
不仅能保证供应链够安全、性价比够高,还能给车企客户提供更多的支持服务。
NO.3 听说造大算力芯片很难?
黄畅:从 PPT 走向真正量产,挑战其实蛮多的。
第一,芯片能否满足前装车规要求,会影响到客户,影响整个市场的信心。
第二,算法生态不够成熟,坦率来说,自动驾驶里 AI 算法生态是由英伟达来主导的,而国内各家 AI 芯片或者自动驾驶芯片不可能完全兼容英伟达的处理器架构。
如何将基于英伟达 GPU 上开发出来的算法方案,以尽可能顺滑的方式迁移到自动驾驶处理器上?——这是一个来自算法生态的挑战。
第三,自动驾驶是个非常复杂的系统,包括很多模块/子系统。如果要将这些东西集成整合在一起,去调试debug、持续进行调优,是离不开操作系统的。
高阶的自动驾驶系统还缺少一个比较成熟的操作系统,过往方案都是沿用偏传统的像QNX、Android及其他MCU演进过来的系统,或者是基于 Linux 开发。
在中间件层面上,AUTOSAR AP与CP也不够成熟和完善,各家的方案在操作系统中间件层面上选择差异很大。
这意味着自动驾驶的软件操作系统还处在非常初期,很混乱,不够标准化,导致软件工程的效率不高。
NO.4 听说地平线征程5的CPU不够用?
黄畅:确实,和同时代的其他的自动驾驶芯片相比,征程5 的 CPU 算力是有些偏弱。
目前CPU算力的大小是地平线在过去做出的一个选择,一个芯片,从它的定义到设计开发,到量产制造,整个周期非常长。
不过既然当时做了这个选择,那我们就要去将它的长板尽可能发挥好,并且通过其他方式弥补短板。
而且最初我们做这样的产品定义,是源于一个基本的判断——自动驾驶方案会像 AI 算法发展趋势一样,越来越多地依赖 AI 的算法,而不是传统的基于规则的算法。
我们不仅仅在芯片设计上做了这样取舍,在整个自动驾驶方案的层面,我们也在践行AI算法为主的理念。
地平线很早就基于征程5做了类似于BEV的综合感知,以及基于深度学习的规控,这套方案可以大幅降低对于 CPU 算力的消耗——理论上可以降低一个数量级。
或许大家很快会发现,征程5的 CPU 算力是足以满足高阶的自动驾驶方案。
NO.5 听说地平线征程5还不错?
侯聪:征程 5 芯片的神经网络推理算力还是充沛的,在算力层面上并没有碰到挑战,只需要把模型适配到征程5上即可,包括一些算子的重新调整和设计。
但是 CPU 算力相较于之前用的平台会有下降,所以我们做了大量的性能优化,针对征程5的CPU算力特点做了架构调整。
以感知为例,做成了一个大的模型来尽量减少CPU消耗——也就是规则的部分算力。轻舟的大模型叫OmniNet,通过超融合的设计理念,将传感器的输入通过前中后以及时序融合,最终输出感知结果。
这样形成了数据驱动的开发方式,减少了对于规则编写的依赖。
NO.6 听说数据驱动是个大趋势?
侯聪:从大的行业趋势来看,还是会往数据驱动去走,主要是因为车量产以后,会有大量的数据产生并回收回来。
通过一些在线的数据挖掘,可以回收大量的长尾问题数据。当然,通过仿真的手段也可以模拟出长尾问题数据,作为补充。
但纯数据驱动的缺点是迭代周期会相对长,因为需要采集大量的数据来去处理相关的场景,尤其对于数据很少的长尾问题而言——其中有些场景通过一些简单规则就可快速地处理。
这也是为什么我们认为基于规则的算法依然有它的价值。
此外,基于规则的算法的可解释性会更强一些,这样有利于打磨更好的人机交互产品,可给到车主用户更直观的反馈。
NO.7 听说轻舟的城市NOA方案做得不错?
侯聪:作为CTO,我觉得整体上算是及格,可以看到在很多场景下的表现,依然有很大的提高空间。
NO.8 听说中央计算最近很火?
黄畅:中央计算是一个必然的趋势,过去的各种电子设备,例如PC、手机等,都经历着这个过程。
甚至是小时候玩的任天堂游戏显卡,早年的游戏卡很沉,里头有好几十片芯片,但是后来游戏卡越来越轻,逐渐演变成了一颗芯片。
只是汽车架构走向中央计算的这一过程不像很多人所预想那么快,因为传统汽车行业有自身的发展规律——积累得越厚重,发展速度相对越慢。
目前拥有中央处理器思路的,更多是一些新晋的玩家,尤其是有互联网、ICT背景的。
一个词 评价下轻舟智航?
黄畅:快。
从我们在战略上达成共识开始,只用了不到半年就拿出了一个很高水平的城区NOA自动驾驶方案,非常难得。
目前基于量产硬件实现的城市NOA方案少之又少,轻舟做出了国内首个基于双征程5芯片的城市NOA方案,可见团队技术功底之深。
一个词 评价下地平线?
侯聪:卷。
当然他们不仅是卷自己,也在卷我们这样的生态合作伙伴,一起把中国的自动驾驶系统推向新的高度。
最后,关于地平线和轻舟
你还有哪些问题想给到当事人?
评论区告诉我们
来源:第一电动网
作者:HiEV
本文地址:https://www.d1ev.com/kol/193556
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!







 京公网安备
11010502033163号
京公网安备
11010502033163号