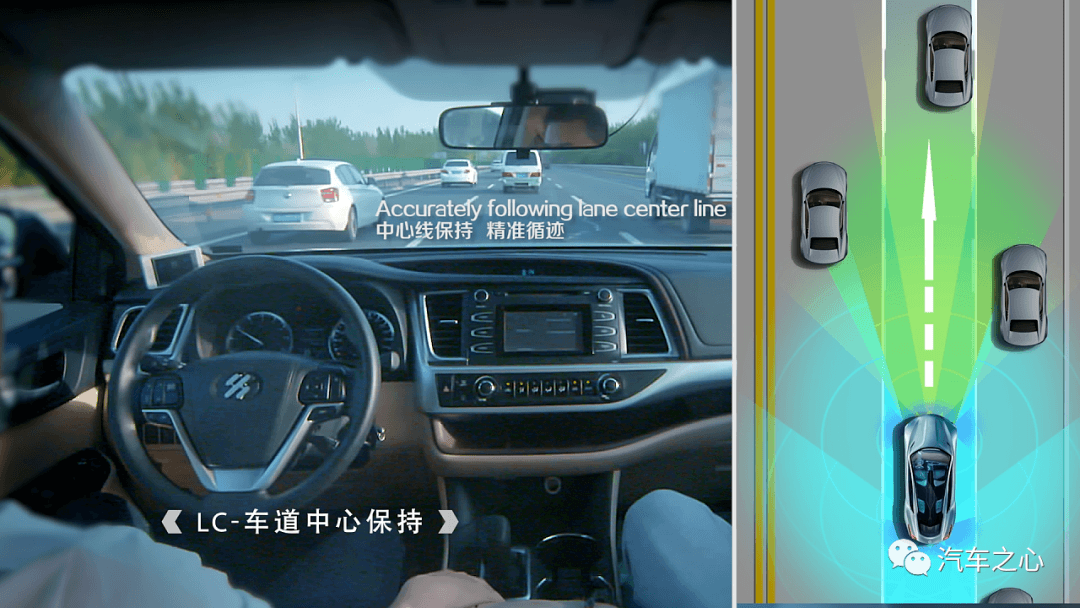
成本低至万元,仅需 16tops 算力就能实现领航辅助驾驶(NOA),你相信吗?
5 月 24 日,易航智能首次对外公布其全栈自研的前装量产 NOA 平台。
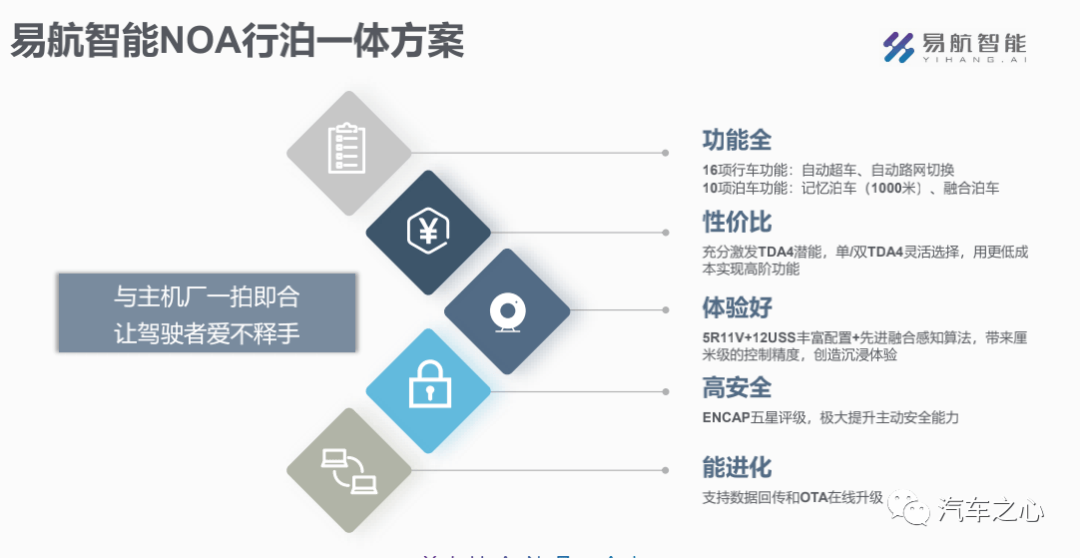
这一方案采用 TI TDA4 平台,仅需要 16TOPS 算力,就能实现 16 项行车功能和 10 项泊车功能,包括自动超车、自动路网切换、记忆泊车等。
在价格上,易航 NOA 量产方案低至万元以内,相比其他已上市 NOA 方案,成本降低 50%以上。同时,易航 NOA 还可以通过灵活的硬件配置方案覆盖到 15 万元以内车型。
可以说,这是目前国内最具性价比的 NOA 行泊一体量产方案。
基于大算力平台英伟达 Orin,易航智能正在研发全场景自动驾驶 FSD 解决方案,预计将于今年年底实现量产,目前已经拿到威马汽车的前装量产定点合作。
NOA 的量产上车,将自动驾驶带入全新阶段。
易航智能创始人兼 CEO 陈禹行认为,在自动驾驶长河中,NOA 是量产新阶段,以场景为核心的自动驾驶路径中,FSD 将成为行业拐点。此后,整个自动驾驶行业将进入稳定发展期。
从 ADAS 到 NOA,再到 FSD,以场景为核心的自动驾驶量产路径,正推动着自动驾驶技术不断向前发展,最终实现将无人驾驶带进现实的最高目标。
01、易航智能打造低成本、高性价比 NOA 方案
据乘联会数据统计,2021 年我国乘用车累计销量为2105.4 万辆,同比增长 6.4%。
其中,9 万以下的低端车售出271.4 万辆,同比大涨 29.5%;20 万以上的高端车售出 757.8 万辆,同比增长 10.0%,9 万-19 万元中端车累计销量为1076.2 万辆,同比增幅-0.3%。
由此来看,中低端车型仍占据着国内汽车市场绝大部分市场份额,是市场量最大的一部分车型。
而相较于高端车型,中低端车型对于前装量产产品的价格成本更为敏感。
因此,在面向 15 万级别以内的车型,易航智能所打造的 NOA——主打低成本、高性价比。
低成本:易航智能 NOA 综合成本约 8000-9000 元人民币,比其他方案成本降低 50% 以上。
高性价比:涵盖 16 项行车功能和 10 项泊车功能,已实现 NOA 功能里最完整的功能形态。
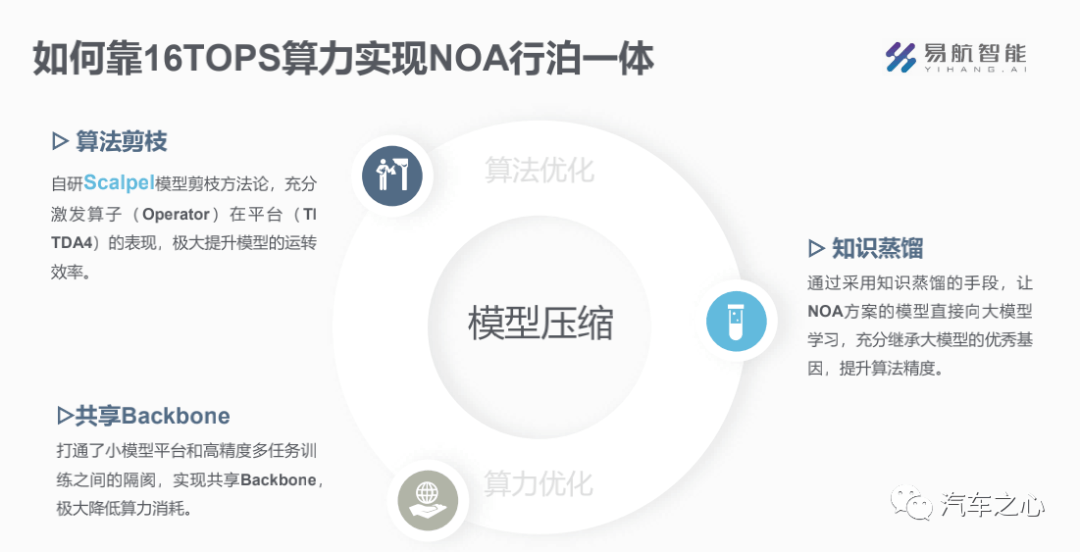
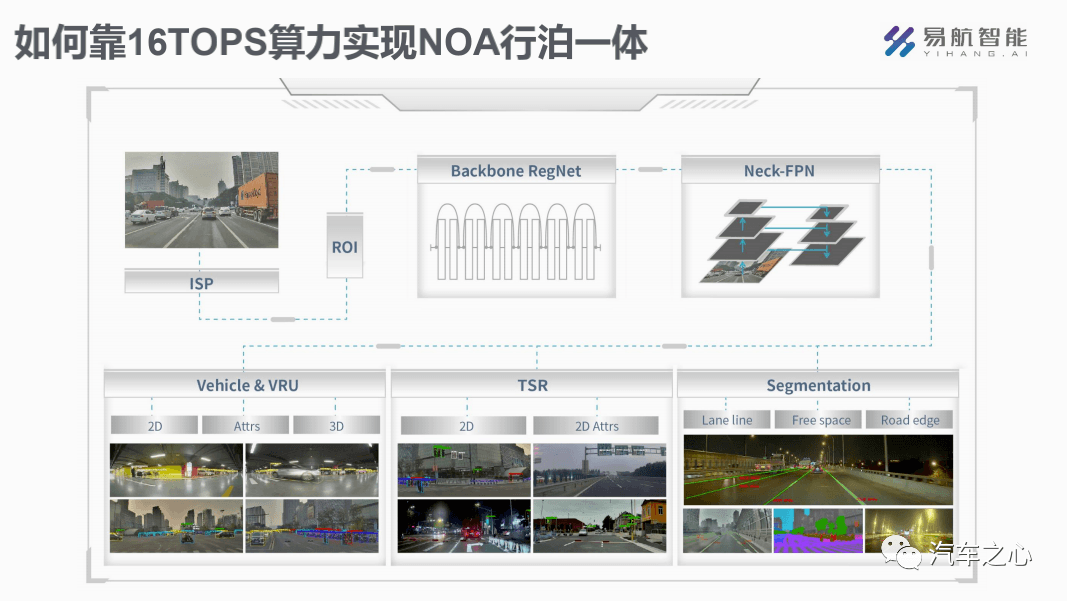
在低成本、高性价比的背后,则有着易航智能一套独特的打法:基于独特的软件算法和算力优化能力,仅需要 16TOPS 就可以实现非常全面的 NOA 功能。
硬件层面上,易航智能并未追求大算力平台,而是选用了德州仪器TDA4 芯片,提供单芯片和双芯片两种方案,最高算力仅为 16TOPS。
软件算法上:主要采用算法剪枝和知识蒸馏的方式进行算法优化。
一方面是通过自研的知识蒸馏构建一套大模型,通过让 NOA 在大模型中学习,充分继承大模型中的优秀基因,提升算法精度。
另一方,算法剪枝则是在保证大模型的精度条件,对模型进行压缩,压缩成小模型,从而提升模型运转效率。
算力优化方面,易航智能则采用了共享Backbone 的方式。
在整个算法中,易航智行打通了小模型平台和高精度多任务训练之间的隔阂,使障碍物检测、图像分割、交通标志检测等深度学习任务都共享同样的 Backbone,可极大降低算力消耗,实现高精度的多任务的感知结果。
一般来说,一个好的 NOA 产品,主要从三方面进行评判:
技术层面,不再是简单的汽车电子模块的叠加优化,而是整个自动驾驶域的重构。整车电子电气架构从原本的分散式向域控制器模式的转变,也促进了 NOA 功能的实现,反之,NOA 功能也促进了域控制器向更集中化发展。
数据方面,需要持续的积累数据的能力和迭代升级的能力,NOA 内含影子模式、数据回传等功能,需要其能够快速积累自动驾驶数据。
商业方面,则需要具备足够的商业竞争力,即面向前装量产的产品需要把控好成本,能覆盖更多价位、更广泛的车型,这样才能实现大规模的量产。
陈禹行认为:「除了围绕算法、算力方面的创新,能推出高性价比方案,则得益于易航智能在软硬件开发、海量数据积累和丰富的量产经验,这是一个综合实力的体现。」
而在这背后,也是易航智能数年来构建的全栈自主研发能力的体现。
02、坚持全栈自研,构建核心竞争优势
于自动驾驶而言,想要将技术做成 Demo 进行展示很容易,但想要真正的实现前装量产,大规模上车,则非易事。
全栈自研,则是易航智能让技术更快实现前装量产的必备条件。
为什么坚持全栈自研,陈禹行表示原因有三:
首先,在量产阶段,自动驾驶系统中的软硬件高度耦合,研发过程中会出现各种各样的技术问题,很难将其归结为软件问题还是硬件问题,只有全栈自研,才能去统一分析原因。
其次,全栈自研是实现更好驾乘体验的必要条件。自动驾驶系统中感知、规划、控制高度耦合,且这也决定着整个自动驾驶里的用户体验,如果想要实现 1+1>2 的效果,就必须两者一起优化。
其三,全栈自研能够更好满足车企的定制化需求。因为车企对成本要求严格,只有拥有全栈自研的能力,才能根据客户的要求来提供定制化的解决方案。
陈禹行表示:「自动驾驶 Demo 展示的是车辆最佳状态时的表现,而自动驾驶量产要保证各种工况下的稳定。只有把所有技术细节都做一遍,才能拥有系统工程经验——而自动驾驶本身就是一项系统工程。」
截至目前,易航智能已经构建了像感知、决策规划控制、软硬件开发,包括测试标定、量产等能力,几乎涉及到整个技术链条。
截止目前,易航智能已经量产上路的车大概有 10 万辆,积累约10 亿公里的驾驶数据。
为了充分利用这些数据,易航智能还在苏州建立研发中心和专用自动驾驶摄像头工厂。
据了解,这间工厂主要包含如 ISP 的算法、摄像头的开发和摄像头的生产等业务。
于易航智能而言,在整个量产的 NOA 行泊一体产品上,最核心的竞争优势就是在于其所打造的领先的自动驾驶算法,以及由此带来的成本优势。
当然,这里所说的算法,并不是易航智能所展现出的功能上的算法,而是基于大量前装量产经验所产生的产品级量产算法。
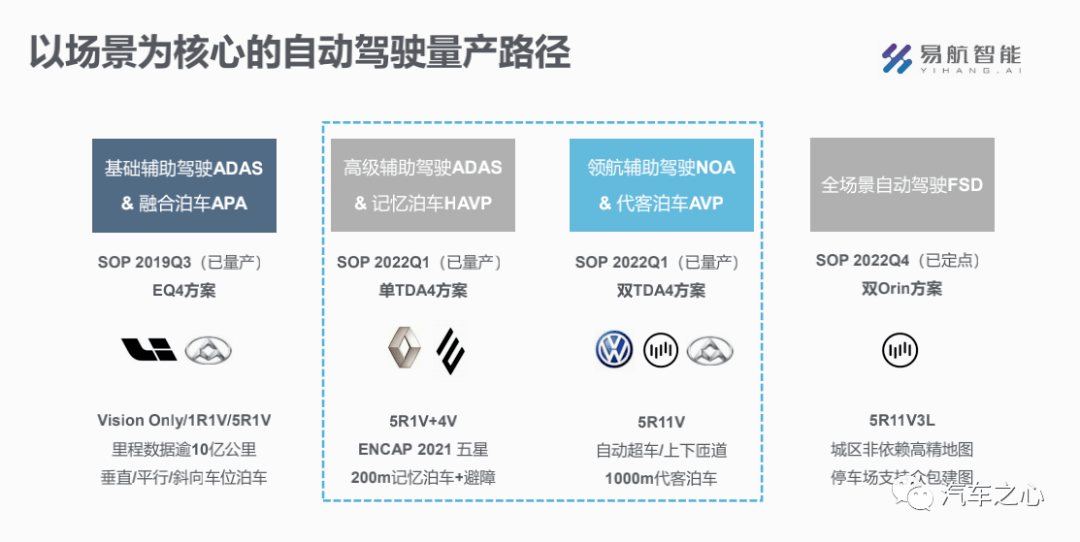
目前,易航智能整个业务以场景为核心,构建了 4 大产品线,包含:
最基础的 ADAS 产品
高级 ADAS 产品
NOA 产品
下一代全场景的自动驾驶 FSD
截至目前,前 3 个产品已实现前装量产上车,今年搭载 NOA 功能的车型也将批量上市,合作的车企包括大通、威马、雷诺等。
陈禹行透露,今年已经拿到更多新的 NOA 量产项目,将会在今年晚些时候公布。
与此同时,陈禹行也表示,易航智能也正在研发面向下一代全场景的 FSD,基于大算力双 Orin 芯片打造,预计将在今年年底量产上市,定点合作车企为威马。
在功能上,FSD 解决方案打通全场景,包括城区、高速、快速出口,以及社区、地库等,实现全场景点对点自动驾驶功能。
易航智能以全栈自研的技术体系为基础,坚持走以场景为核心的自动驾驶路径,从 ADAS,到 NOA,再到 FSD,最终朝着将无人驾驶带进现实的最终目标迈进。
03、NOA 为量产新阶段,FSD 将是行业拐点
原本的自动驾驶发展路径中,一般是从自动驾驶级别为切入点,包含两条路径:
一条是直接研究 L4 级以上自动驾驶路线
另一条则是从 L1 逐步向上迈进
但以此分类会出现一个问题,即能够实现自动驾驶的场景极为有限,如车企新车型要搭载 L3/L4 自动驾驶技术,但却只局限在高速公路上,或者在城区部分道路上,且最高时速不超过 60 公里。
在此背景下,终端用户就会对自动驾驶功能兴趣并不大,启用的时间也相对较短。
因此,围绕场景开发自动驾驶,逐渐成为主流趋势。
什么是「围绕场景开发自动驾驶」?
所谓的以「场景为核心」,就是先用自动驾驶解决行驶过程中存在的 95% 场景,剩余的 5% 场景则先由人接管,等技术升级迭代之后,慢慢解决这 5% 的难题。
举例来说:
在日常上下班通勤时,整个车程要 2 个小时,路上途径一个菜市场,环境非常复杂,现有技术很难完全把它解决掉,而途径菜市场的整个路程仅需 5 分钟。
那么以围绕场景做自动驾驶的思路,就是先把整段路程的 1 小时 55 分钟的事情先用自动驾驶解决掉,剩下菜市场的 5 分钟 Corner case 则由人来监管,后续通过技术的提升迭代,逐渐解决这部分问题。
陈禹行表示:「围绕场景做自动驾驶系统,对终端用户更为友好,用户会更愿意使用自动驾驶系统。」
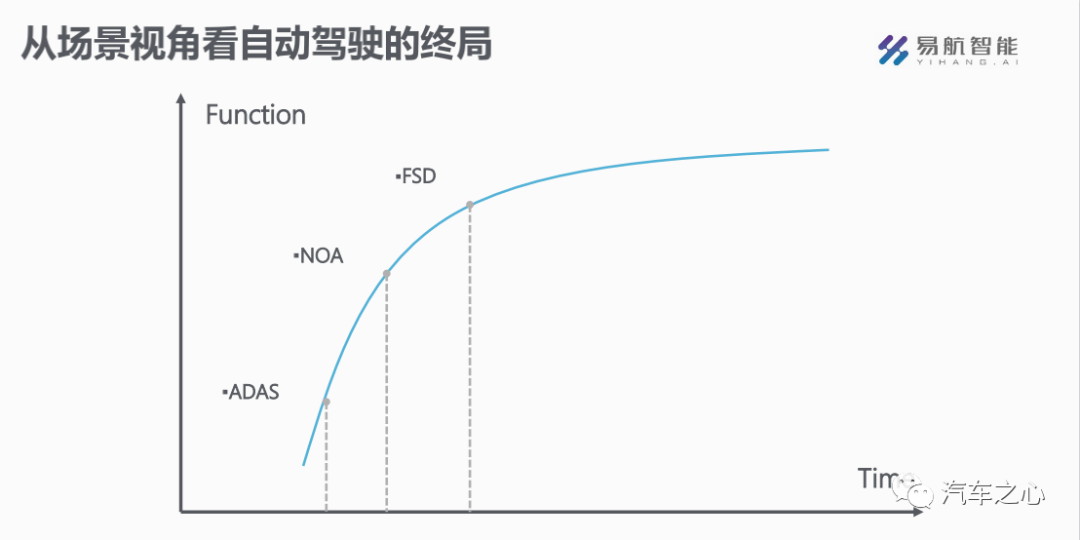
而以场景为核心的自动驾驶技术逐渐过渡至无人驾驶,将会经历三个阶段:
其一,从 ADAS 切入,功能相对简单,提供碎片化的辅助驾驶功能。
其二,NOA 行泊一体的方案,是 ADAS 至 FSD 之间过渡阶段,也是自动驾驶量产的新阶段。
为什么说 NOA 是过渡方案?易航智能认为,NOA 具备 3 大特征:
功能上,NOA 开启人机共驾时代,实现点对点长时间的自动驾驶能力,这也是后续 FSD 的基础。
体验上,NOA 系统打破辅助驾驶碎片化功能,创造了在典型场景下沉浸式的自动驾驶体验,可以把驾驶者从驾驶行为中解放出来,有利于推动自动驾驶大规模的普及。
技术上,NOA 相比 ADAS 有了质的飞跃。NOA 具备人机共驾能力,所以也具备了数据收集能力,可以实现真正意义上的自动驾驶,积累高价值的数据。
综上,NOA 将自动驾驶带入了一个全新阶段。但这也仅仅是自动驾驶长河中的过渡阶段,而 FSD 才是整个行业真正的拐点。
其三,全场景自动驾驶 FSD,在这一阶段,自动驾驶能够应对大部分的城市场景,比如从家到公司,用手机从车库召唤车辆到用户面前,上车之后自动驾驶到单位,并自动去停车位停车。
但自动驾驶仍存在一些长尾效应,部分复杂的场景,FSD 依然不能应对。
陈禹行认为,在 FSD 之后,行业将会迎来一个稳定的发展期。在此期间,自动驾驶的发展会相对稳定,功能也比较确定,这时候大家主要的精力将会是慢慢解决剩余 1% 的长尾 Corner case。
在自动驾驶赛道长河中,NOA 将自动驾驶带入全新阶段。
也有越来越多的玩家进入这一领域,甚至部分 L4 级企业也开始将技术降维应用,以期能够通过先进的算法优势打造体验更好的 NOA 解决方案。
业内常提,L4 自动驾驶企业将降维打击 L2+企业,但易航智能却认为,从入行之初至今所积累的量产经验和优势,以及全栈自研的技术体系,能够使其自动驾驶技术更快的实现前装量产。
大算力平台的应用、激光雷达的上车,硬件层面上,L2+与 L4 的界限逐渐模糊,软件算法层面,L2+ 公司逐渐向上,L4 自动驾驶公司意欲向下应用。
在不远的将来,二者或必有一战,谁能最终走到最后,值得期待。
来源:第一电动网
作者:汽车之心
本文地址:https://www.d1ev.com/kol/176339
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!







 京公网安备
11010502033163号
京公网安备
11010502033163号