前几日日产汽车的下一大带有激光雷达的Pro-Pilot演示车辆在比较大范围内宣传,很有意思的事,和其他两家日企不一样,日产目前是围绕自己的AD/ADAS先进技术研发部在开发,是在原有的Pro-Pilot 2.0上通过加入Luminar Lidar传感器的方式迭代,结合日产的情况,我顺带着梳理三家日企不同的思路。
● 日产
日产还在雷诺、日产和三菱的联盟里面承担很重要的开发角色,在高通的自动驾驶芯片发布会上,RNM联盟之前和Waymo合作,也没推下去特别快,现在随着雷诺开始卖日产的大部分股权,从分工来看,日产和雷诺在EE架构上,由雷诺牵头,在自动驾驶上开发HPC的硬件和软件,由日产牵头。
● 丰田
丰田现在的亲儿子是Woven Planet Group,顺带着投资Aurora和Pony做个备份,而丰田的自研团队总体专注于L2+的开发,其实丰田现在座舱都需要挺长一段时间搞明白,这块投入巨资的汽车灵魂事业可能还是靠美国研究团队多一些。
●本田
本田的Legend开发,更像是日系自动驾驶团队最后的挣扎,不管是在成本控制,控制系统的迭代开发方面,都很难跟上;所以本田在投资上和GM还是全力投资Cruise,也是靠两家的资本力量去扶持一个独立的自动驾驶开发公司。
总体而言,在这里看RNM想要在自动辅助驾驶技术方面跟上前面几家,主要看持续投入的力度,目前雷诺(在俄一把损失资产和销量)和日产从财务角度失血比较严重。
备注:对于一枚身处上海的被动宅来说,这两个月就一直在家,不过希望各位读者连我的那份都这个5天的劳动节去蹦哒,各位读者节日快乐!节日都有选择不宅家的权力,能好好出去玩一下!
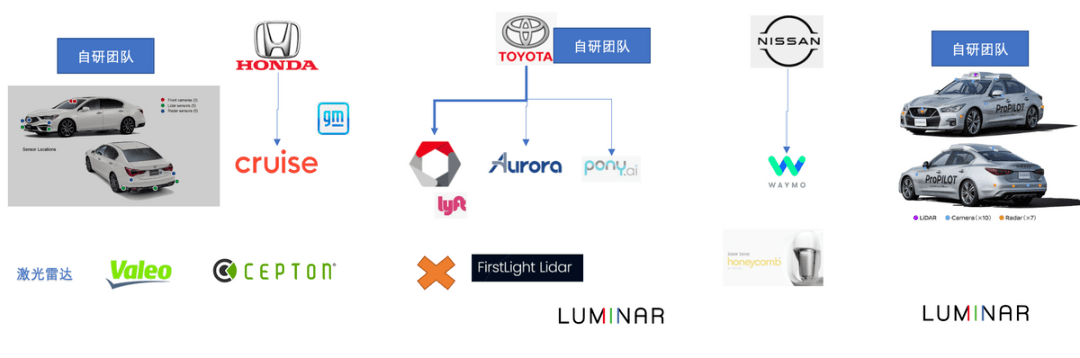
▲图1. 三家日企自动辅助驾驶开发的布局
Part 1 日产的自动辅助系统开发
日产之前的Pro Pilot都是基于外部的视觉算法,整个工作主要集成工作为主,而这次和展示的要把激光雷达整合到新一代ProPilot的感知配置如下:
(1)10个摄像头
这个安装方案类似于通常L4加装感知套件的做法,目前有点像出租车加装顶牌一样。在ProPilot 2.0的8 颗摄像头(3颗前视+ 4 AVM + 1 DMS)
1个前置摄像头用于前方大范围FOV的视野探测
2个前方视野摄像头布置于车顶左右两侧(改变位置)
2个后视摄像头布置于翼子板左右两侧(新增)
1个后视布置在车顶天线处(新增)
在这里使用六个摄像头组成覆盖整车的360度视野,比原来增加了3个。
并且配置四个环视的鱼眼摄像头(数量不变),前后+左右后视镜(随着CMS导入,可能会进行集成)
(2)7个毫米波雷达(比原来增加2个)
从布置来看,1个长距离雷达和4个短距雷达布置在车辆4个角落,增加后方的2个长距雷达,后面这两个有啥用实在没看出来,可能是变道时候需要后方车辆的车速信息吧
(3)1个激光雷达(新增)
激光雷达采用luminar的激光雷达,布置于前方车顶
另外还有:
1个高精地图模块
超声波传感器(9个):这个没有明显提升功能性的作用
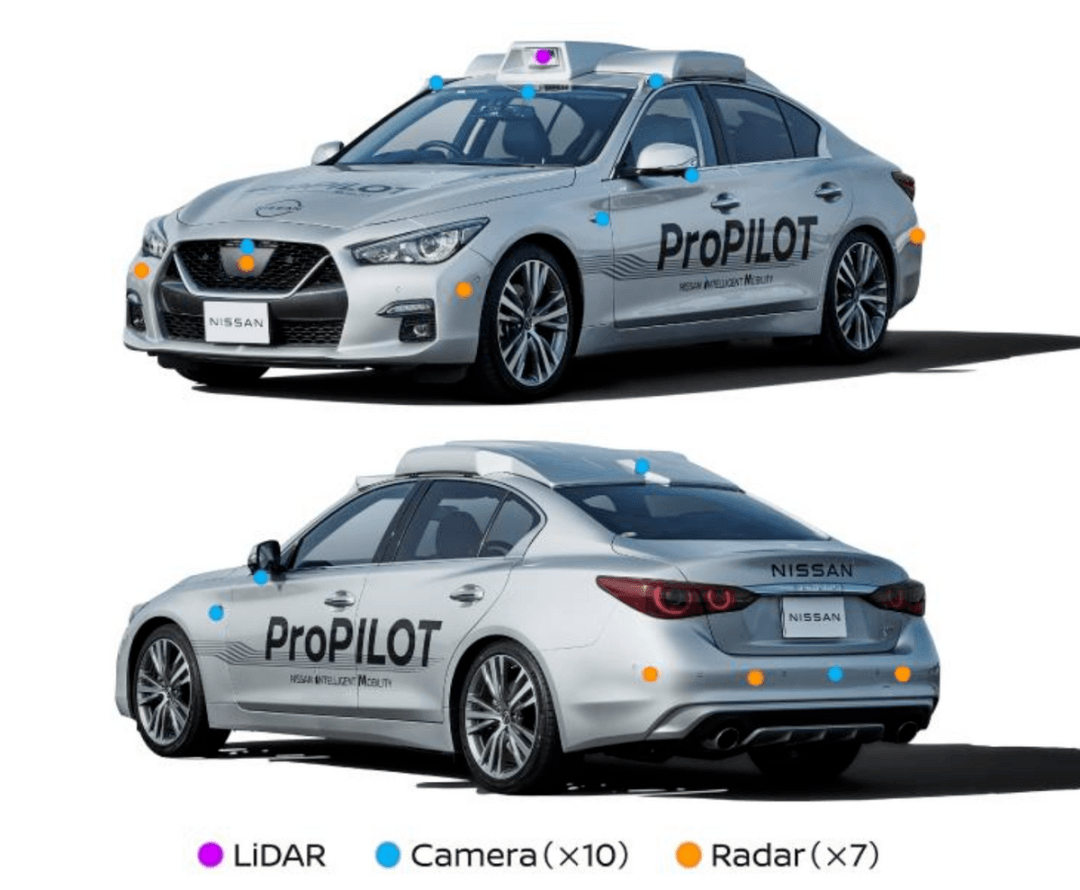
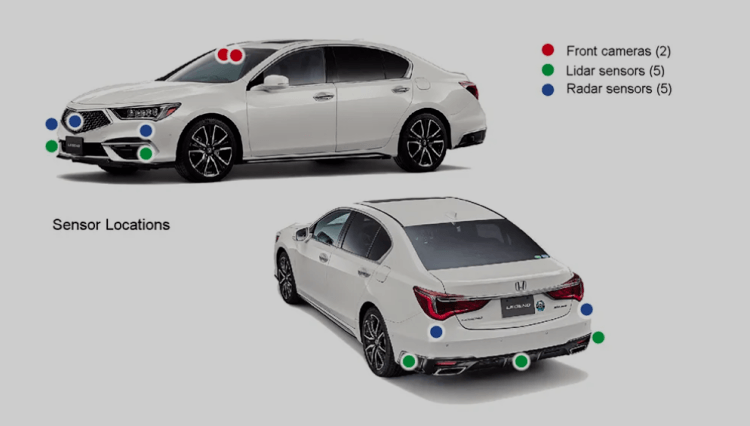
▲图2. 日产的感知配置
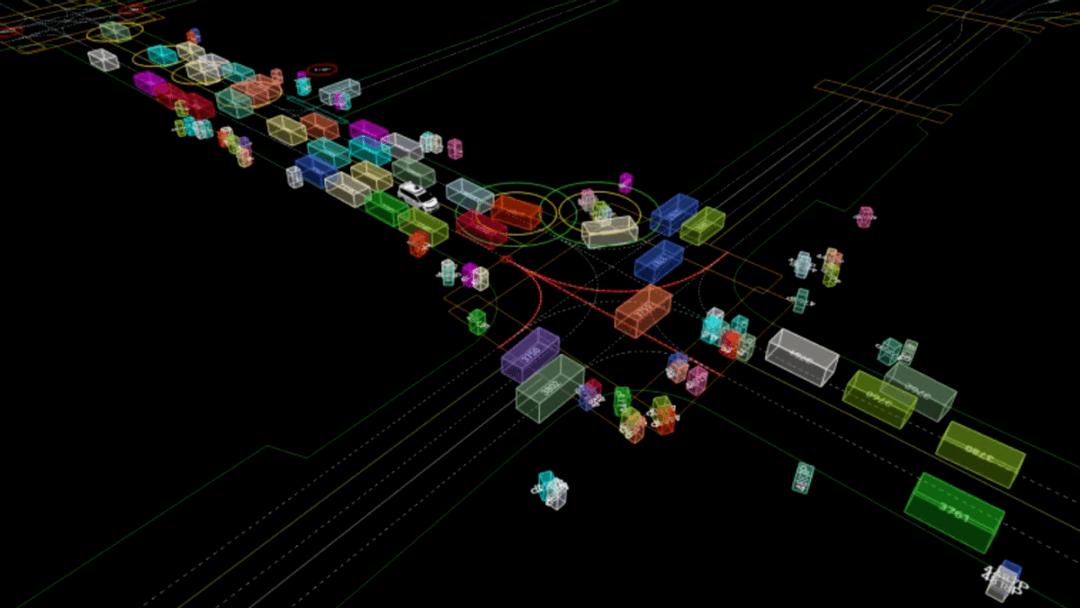
下面这个图可能看得更清楚,日产堆了一圈环视摄像头,在融合算法里面通过雷达、摄像头和激光雷达来做融合,并且称之为“地面实况感知”。目前日产还没有说整个处理器如何实现处理,这方面将来是否能导入高通Snapdragon Ride还是有可能的。
备注:高通和雷诺先宣布,由于硬件平台的一致性,这方面日产可能先选了
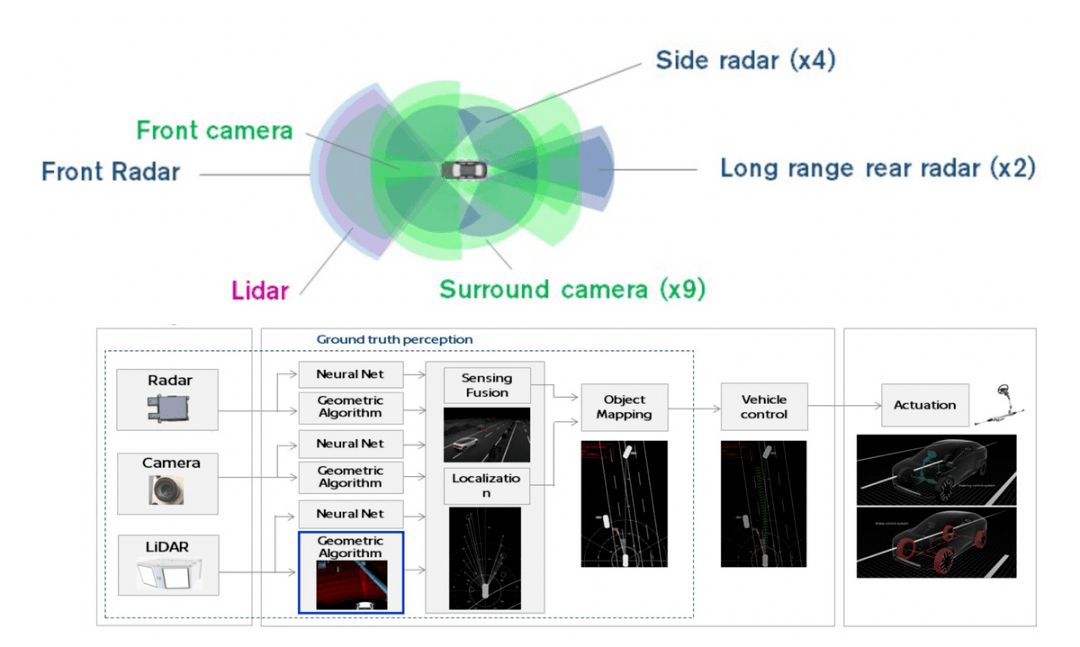
▲图3. 日产的算法自研情况
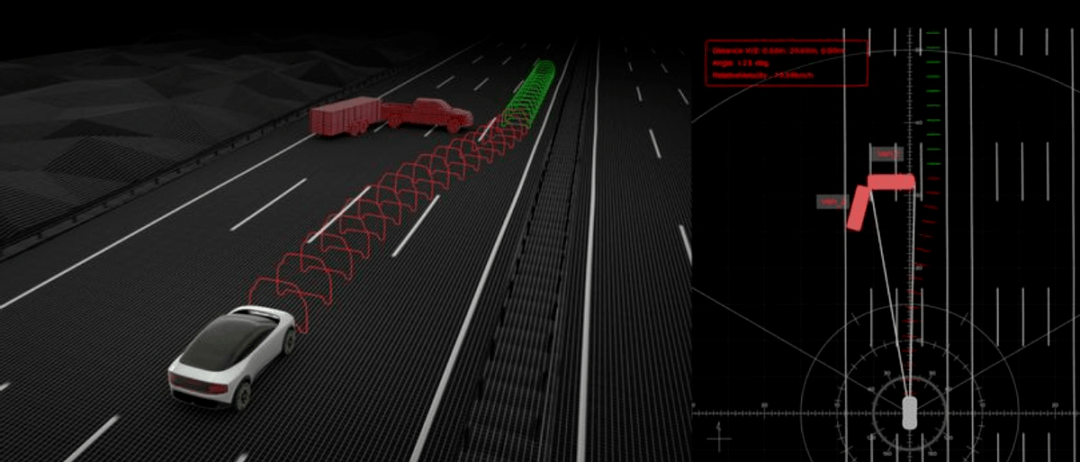
▲图4. 融合的效果展示
在RNM的联盟里面,有约束性的是统一的EE电子电气架构,而在2026年RNM联盟里面下一代车型都会使用通用型的电子电气架构,如果按照这样的设计,整个RNM的车辆造型设计都会出现巨大的挑战,我其实没理解上述怎么解决。
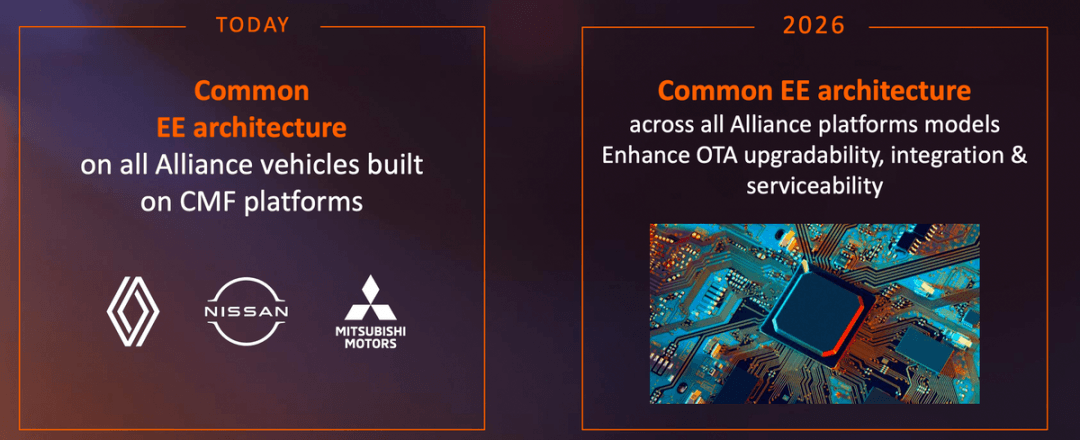
▲图5. RNM统一的电子电气架构
也就是说在2026年,都会去兼容集中式电气电气架构。
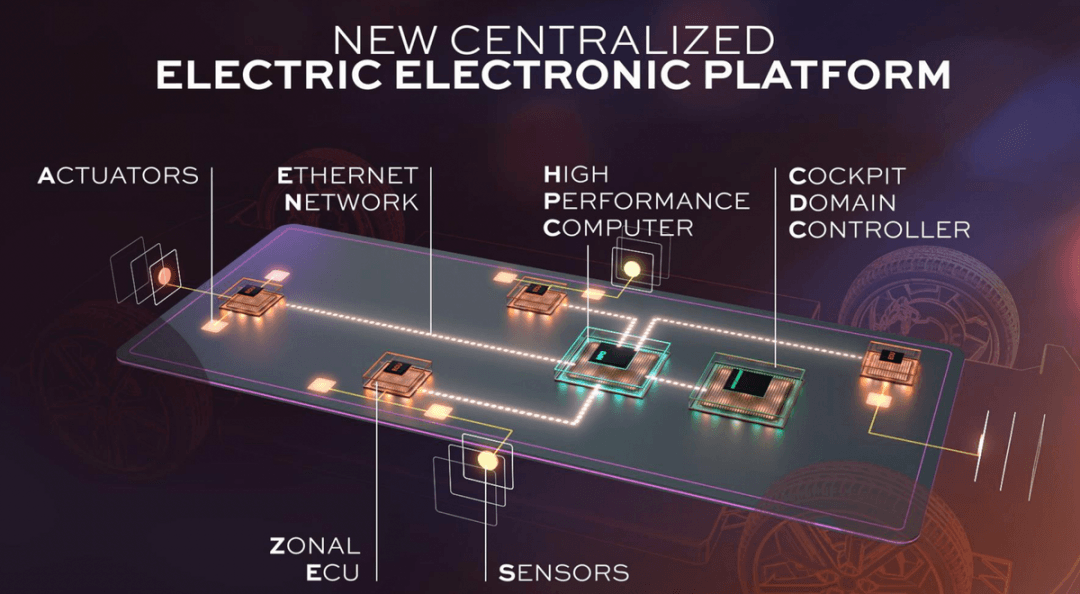
▲图6. 集中式的电子电气架构HPC +Zonal+Sensor架构
这是两边在联合开发过程中的成本节约。
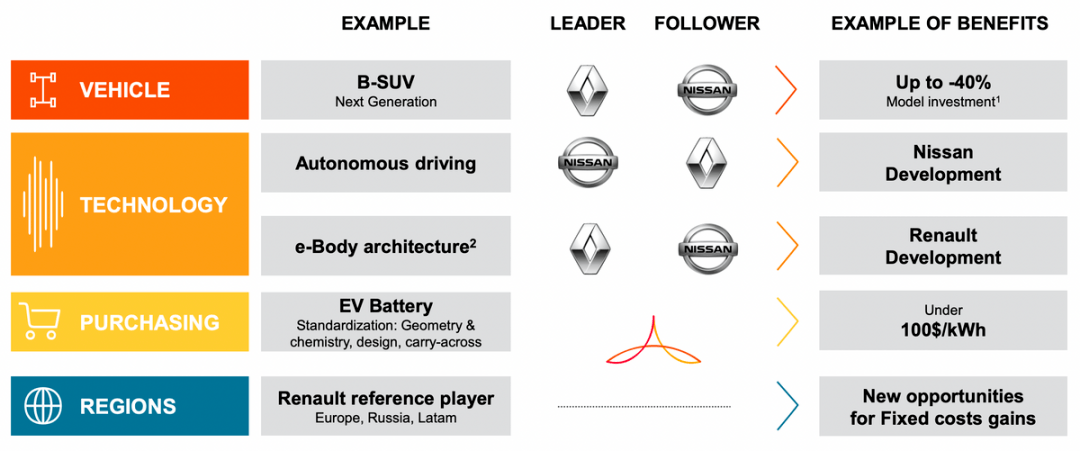
▲图7. 日产在这里主要扮演的角色是日产开发
Part 2 日企在自动驾驶的美国战略
(1)丰田
随着丰田5.5亿美元收购Lyft的自动驾驶部门,Woven Planet的开发路径也在尝试转变。对丰田来说,目前市面上很多车辆如果能收集多样化的驾驶数据,对北美团队开发自动驾驶汽车系统有很大的现实意义。在基于Woven原有的激光雷达中收集数据,通过Lyft在运营车辆上数据埋点(安装摄像头中收集数据),能帮助改进用于为自动驾驶车辆导航的高清地图,摄像头数据包括十字路口、骑车者、步行者,和Lyft司机外出录像。通过这些Woven利用3D计算机视觉和机器学习的结合,从摄像头的画面中自动识别交通对象。
▲图8. Woven买下来Lyft自动驾驶部门也继续保持合作
(2)本田
Legend这个事情,宣传的意义更大一些,随着本田开始大局投资,特别是加强和通用的研发合作,两家其实已经进入实质性先进科技联盟的状态。
▲图9. 全球首个L3的量产车辆给100台的本田Legend所拿到
小结:我的理解,某种意义上日本和美国达成了在智能汽车方面的新一代技术依赖,日本汽车产业可能除了日产以外都很依赖于美国这边的技术开发。等再过几年,苹果系列汽车软件套件出来,可能真有可能快速改变盘面。
来源:第一电动网
作者:朱玉龙
本文地址:https://www.d1ev.com/kol/174128
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号