过去半年以来,有不少投资机构及车企的朋友找笔者交流关于激光雷达的话题。他们提的问题,有不少重叠之处。
关于激光雷达的报道很多,但信息碎片化很严重,而且,对一些基本概念还存在混淆,因此,在回答完大量同质化的问题后,笔者决定把这些问题的答案都整理出来,做一个“科普”。
Q1:哪种技术路线的激光雷达最好?
答:这不是一个好的问题。更准确的问题应该是“在现阶段哪种技术路线占主流”。
首先,关于技术路线,需要澄清一下,激光雷达有好多种分类方法:按测距方法分;按激光发射器、探测器分;按扫描方式分。
按照测距方式,当前车载激光雷达主要分为dTOF(飞行时间法)和iTOF(通过测量相位偏移间接测量飞行时间,分为FMCW和AMCW)两种方式,目前dTOF是市场主流,而FMCW处于预研阶段。
两者的区别是,dTOF是通过记录发射一束激光脉冲与探测器接收到回波信号的时间差,直接计算目标物与传感器之间的距离;而FMCW是通过在时间上调整激光频率并检测发射与回波间的拍频信号,同时完成对目标物距离及速度的探测。
现阶段,ToF是最主流的测距方案,但Mobileye、Aeva及Blackmore(已被Aurora收购)等公司则是从一开始就采用了FMCW测距方案。FMCW和To几乎是两个独立的品类,除了光学镜头、扫描器件相似,其他都完全不同。
当前,产业界讨论比较多的激光雷达技术路线,都是在ToF测距方案这个大前提下讨论的。
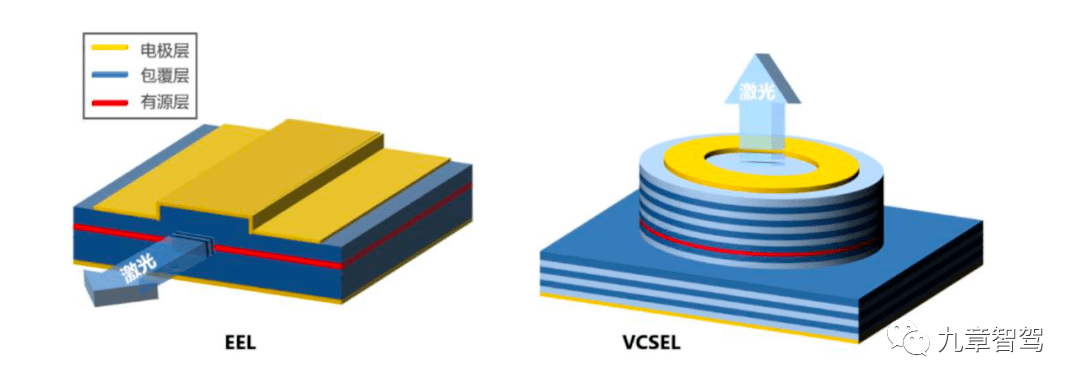
ToF激光雷达的结构分为激光发射器、激光探测器及扫描部件三部分。激光发射器按波长可主要分为905 nm和1550 nm两种,按集成度主要可分为EEL(边发射激光器)和VCSEL(垂直腔面发射激光器)两种;激光探测器按集成度和感光灵敏度主要分为APD(雪崩光电二极管)和SPAD(单光子光电探测雪崩二极)等;按扫描部件,可分机械旋转式、混合固态与纯固态。
(以上每种分类方法下列举的类型都不齐全,此处仅选取了最具代表性的方案。)
现在,外界谈的激光雷达分类,通常特指根据扫描部件来划分。
传统的“机械旋转式”,这个概念已经没有什么争议了,就是产品整体被电机带着360度旋转;混合固态的概念,简单地说,就是有一部分部件是机械运动的,另一部分是不运动的,虽然概念是清晰的,但过去几年也有不少误解;纯固态,就是完全没有机械运动部件,这个概念虽然很清晰,但此前也有一些误解。
在2017-2019年间,按一些老牌厂商给出的定义,机械旋转式产品只要把上面旋转的部分封在一个盒子里面起来就变成“混合固态”了,但这实际上还是机械旋转式。在那个阶段,MEMS(微振镜式)被划为“纯固态”类,这也是个误解,因为MEMS也存在机械运动部件。
到了2020年,主流厂商们对激光雷达按扫描方式如何分类已基本达成共识——
机械旋转式:机械部分(扫描模块)和电子部分(激光收发模块)都在运动——被电机带着360度旋转。
混合固态:激光收发模块是不运动的,只有扫描模块在运动。按扫描模块的运动方式划分,混合固态又分为MEMS、转镜式和棱镜式三种(这个到后面会做更详细的解释)。
纯固态:不仅激光收发模块不运动,而且,扫描模块也没有机械运动。纯固态方案主要有OPA和Flash两种。
总体上,从机械旋转到半固体、再到固态,产品的集成化程度越来越高,成本越来越低。
机械旋转式激光雷达有体积大、可靠性不高、难以过车规、价格高等缺点,但它能的性能指标是很强(距离长、水平扫描角度大)的。正是机械旋转式激光雷达帮助自动驾驶产业完成了从0到1的阶段——在这个阶段,它的那些缺点,都是可以被包容的。
机械旋转式激光雷达主要卖给Robotaxi的测试车队,由于需求量少,Robotaxi客户对激光雷达价格的敏感度并不高;并且,这些B端客户对激光雷达的技术成熟度、可靠性会有一个比较理性的预期,为确保安全,他们也会严格遵循厂商提供的使用期限,如果超期,会及时更换。此外,他们还会安排专人对激光雷达做定期的检查、维护,有问题也可及时发现。
目前,全球范围内Robotaxi市场上占比最高的激光雷达就是禾赛的40线和64线产品。据禾赛招股书上的信息,2019年之后,64线产品卖得比40线还好。笔者曾问过几家禾赛的客户,他们对机械旋转式激光雷达的价格高有些意见,但对其性能则是相当认可的。
不过,如果要把激光雷达装到前装量产车上,就不一样了。这些车,大多是要卖给终端消费者做私家车的。消费者会定期去检查车上的激光雷达是否出问题了吗?
而且,可能明明激光雷达的设计寿命已经满了,但有些消费者还是“照用不误”。在私家车被拿去“开滴滴“、每天工作16个小时以上的情况下,激光雷达的稳定性、散热能力、抗振动能力面临的挑战就更大了。
因此,要打进前装量产市场,激光雷达必须达到车规级标准。
从2020年Q4开始,无论激光雷达厂商还是车企都在高调喊“前装量产”,在这个阶段,除性能指标外,车规、集成度、可量产、成本等都是需要重点考虑的问题,这个阶段,机械旋转式激光雷达基本上退出角逐,现在,争抢前装量产市场的,基本都是混合固态产品。
在自动驾驶产业从1到10的阶段,混合固态激光雷达将扮演重要角色。如华为不做Robotaix测试市场,所以跳过了机械旋转式方案,直接从混合固态开始;而在机械旋转式激光市场上最具有竞争力的禾赛,也在开发面向前装量产市场的混合固态产品(MEMS、转镜)。
但在更长的时间维度上来看,混合固态激光雷达也只是过渡形态,纯固态激光雷达才是未来。纯固态主要分OPA和Flash,但率先提出OPA路线的Quanergy公司已从自动驾驶市场上出局,目前,主流厂商也很少有在开发OPA产品的;当前,Ibeo、大陆、Ouster等公司的纯固态激光雷达,都是基于Flash方案。其中,Ouster公司的Flash激光雷达已搭载在多家公司的无人卡车、矿车、环卫车上了。
哪怕是连现阶段主打机械旋转式和混合固态激光雷达的禾赛和华为等厂商也承认,纯固态代表未来趋势,因此,他们均有相关技术储备。禾赛招股书中提到其正在储备的纯固态激光雷达,虽没有明说是不是Flash,但也强调了“基于电子扫描”。
纯固态激光雷达不仅体积小,而且由于没有运动部件,可靠性也更高,待技术成熟之后,其成本也会更低。但当前,纯固态激光雷达的致命弱点是探测距离比较短,如Ibeo公司提供给长城的Flash激光雷达ibeoNext,探测距离只有130米。
做长探测距离,有两个手段:提高激光发射器的功率,提高激光探测器的感光灵敏度。现阶段,这两款技术都还不成熟。等这两块技术都成熟了,并且成本也可接受了,Flash为代表的纯固态将成为主流。
2017年底,Velodyne高管在接受笔者采 访时说:“Flash方案不适合车用,我们内部已经是有共识的。” 现在看来,Velodyne之前 对技术演进趋势出现了严重误判,他们没想到,随着技术的进步,Flash激光雷达的探测距离是能够提升的。
Q2:MEMS、转镜式、棱镜式的代表玩家分别是哪个公司,具体差异点在哪里?
答:MEMS方案的代表公司有Innoviz、速腾聚创、先锋,MEMS激光雷达的优势是分辨率高、集成度高、体积小、成本低(在现有方案中是集成度最高、成本最低的),但MEMS产品遭友商吐槽的点是:扫描镜上的光孔比较小,导致平均每条光束上的能量不足,因而在现有技术条件下探测距离比较短。
不过,由于成本和集成度等原因,MEMS产品在低速自动驾驶市场上有很强的竞争力。速腾聚创很早就绑定菜鸟这个战略客户,在三年多的合作中拿到大量来自客户的真实反馈,技术进步很快。
并且,对乘用车的L2+或NOA来说,由于驾驶责任主体依然是人,自动驾驶系统只不过是锦上添花,并不苛求100%完美,因此,在对性能和成本做了综合考量后,也有车企选择在前装量产车上搭载MEMS激光雷达。如Lucid的首款量产车Lucid Air上就即将搭载速腾聚创的MEMS激光雷达。
禾赛虽然主打机械旋式激光雷达,但其在2019年初发布的PandarGT 3.0,却是基于MEMS方案。根据禾赛在招股书上提到的信息,该公司后续也会研发MEMS产品。
转镜式方案的代表玩家有法雷奥、Luminar、Innovusion(蔚来ET7的激光雷达供应商)及华为。第一个过车规的激光雷达即法雷奥的Scala 就是基于转镜式方案,因为这一方案容易过车规已经过验证了,其他主打前装量产市场的厂商们也纷纷效仿。
(有不少报道及研究机构的文章中把Luminar和华为的技术路线归类为MEMS,这是个误解。每家公司都会储备很多种技术,他们对有的技术方案申请过相关专利,但实际并没有做产品。有一些研究机构仅通过专利来判断别人产品的技术路线,却没有跟相关公司直接接触,因此在分析结果上出现了偏差。)
转镜式和MEMS的区别是:MEMS的扫描镜是围绕着某条直径上下振动,而转镜则是围绕着圆心旋转。这种扫描方式,意味着功耗比较低,散热难度低,因而也容易实现比较高的可靠性。
目前看来,已拿下量产订单的头部公司中,采用转镜式方案的相对比较多。禾赛虽然机械旋转式产品在Robotaxi市场上极具竞争力,但其实该公司早在2017年就布局了转镜方案,只是比较低调,一直没公开说而已。
此外,禾赛的招股书显示,其面向前装量产市场的产品Pandar ST也采用了转镜式方案。
转镜方案分一维转镜(Ibeo、禾赛)和二维转镜(Luminar、Innovusion)两种,所谓一维转镜,即只有一面扫描镜,二维转镜即有一纵一横两面扫描镜。一维转镜是有多少线就有多少个激光发射器,这意味着在做高线数产品时不仅成本高,而且集成难度很大,因而线数很难做高(法雷奥的Scala 1只有4线,Scala 2也只有16线,原因便在于此);二维转镜则跟MEMS类似,是只用数量很少的激光发射器,通过扫描镜高速旋转中的折射和反射来达到“多线”的效果,这样不仅可节省激光器的成本,也可做高“线数”。
禾赛的PandarST将采用一维转镜方案,但不同于Scala,禾赛计划将激光发射器和探测器集成到芯片里面(这个目标将在禾赛芯片化方案Roadmap的2.0阶段实现),实现激光收发系统和“线数”的一一对应,这样,就不仅可以基于一维转镜实现很高的线数,而且还可以持续享受到摩尔定律的红利。
棱镜式扫描方案的代表公司是Livox。棱镜式方案使用的是非重复扫描技术,这意味着,其需要搭配的算法跟主流基于重复扫描技术的激光雷达不同。
与MEMS和二维转镜方案相比,棱镜式方案用的激光发射器数量更多,也能达到更高的点云密度、更远的探测距离,但因电机的转速比转镜式方案下高数倍,棱镜方案对电机轴承等可靠性提出了非常大的挑战。Livox在做无人机时积累了精密电机制造技术,有信心克服这一困难,而目前其他厂商鲜有去探索这一技术的。
Livox的棱镜式产品还可享受一个“红利”:Livox的兄弟公司“大疆车载”会向他们提要求、给反馈,这样,他们自己就形成了一个闭环,有利于技术的快速进步。
Q3:混合固态中的MEMS、转镜式、棱镜式哪个更好?
答:目前,激光雷达的技术路线都尚处在百家争鸣的阶段,这三种方案,都有主流厂商在尝试,甚至,同一家公司同时在做两种以上方案的产品;而且,产品都还没有大规模上车,没经过验证,现在评价“谁行谁不行”,为时尚早。
如Luminar尽管早在一年半前就说拿到了15亿美元的订单,但据其在上市前公布的信息,2020年只卖出去了100颗激光雷达,大批量交付要等到2022年之后。
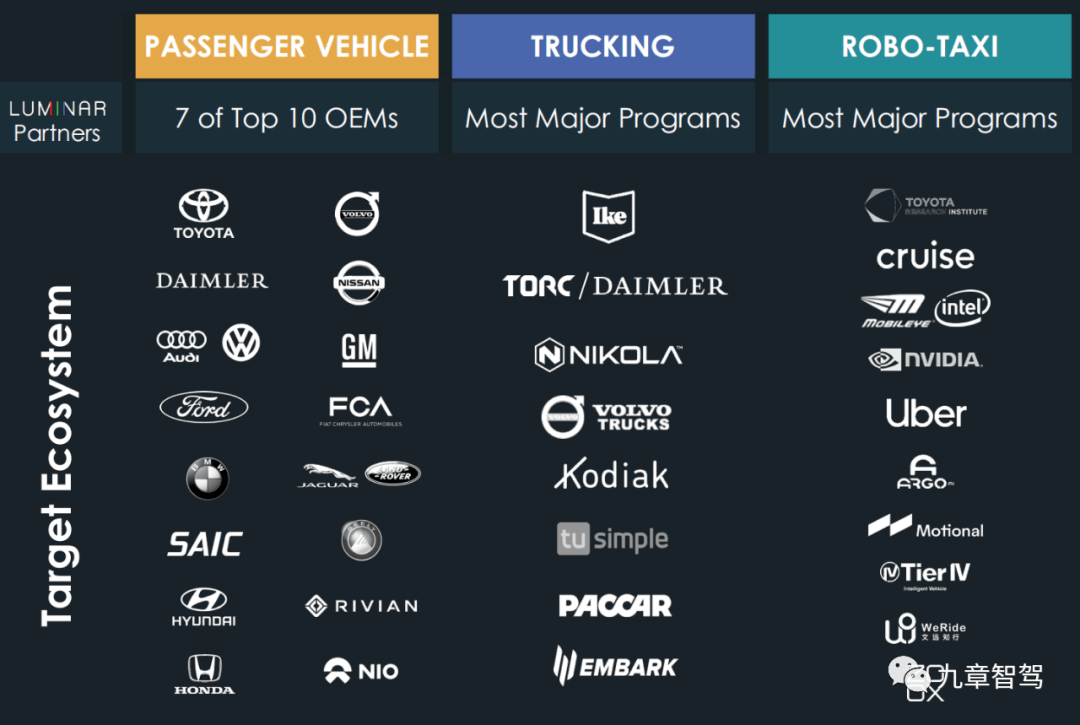
而且,Lumianr公布的很多订单可能只是个供货协议,主要是约束供应商的价格,对车企的订单规模没有太强的约束力。以下是Luminar在上市前展示给投资者的PPT里的客户名单,把奥迪、通用、福特、蔚来等都写进去了,但事实上,奥迪主要是跟Ibeo合作,通用旗下Cruise和福特旗下Argo都在自研激光雷达(Cruise也在跟禾赛合作),而蔚来则选择了Innovusion。
某激光雷达厂商负责人的原话是:“即便是现在跟某个车企签约了,后续的合作中还可能存在变数,未必就会长期合作;现在没签约的,也不代表以后就没机会了。“
笔者估计,哪种技术路线及哪家公司的产品力更强,在2023年底之前会有一一个相对清晰的答案。
Q4:这个行业有先发优势吗?比方说,如果最终证明MEMS方案是最好的,其他几家的路线错了,到时要改,还来得及吗?
答:首选需要澄清,禾赛和华为都有MEMS的技术储备,哪怕没有相关产品,也有专利,因此,不存在MEMS路线胜出后他们就“不知所措”的问题。
而且,MEMS还是转镜式或棱镜式,激光收发模块是可以通用的,区别主要在扫描方案上。那么,一家公司能否快速从转镜或棱镜方案切换到MEMS方案,取决于这样一个问题:激光雷达的真正壁垒在扫描模块,还是在激光收发模块?
如果是前者,在切换到另一种扫描方案就很难,如果是后者,则不难。
有一些厂商认为,扫描方案才是差异化竞争的点,但禾赛在去年7月份接受笔者采 访时提到,扫描方案只是激光雷达的“外功”,激光收发技术才是“内功”。禾赛认为,禾赛在做机械旋转式产品时积累起来的激光收发技术,可复用至转镜式、MEMS及纯固态产品中,只需要对个别参数微调一下即可。Ouster公司也持类似观点。
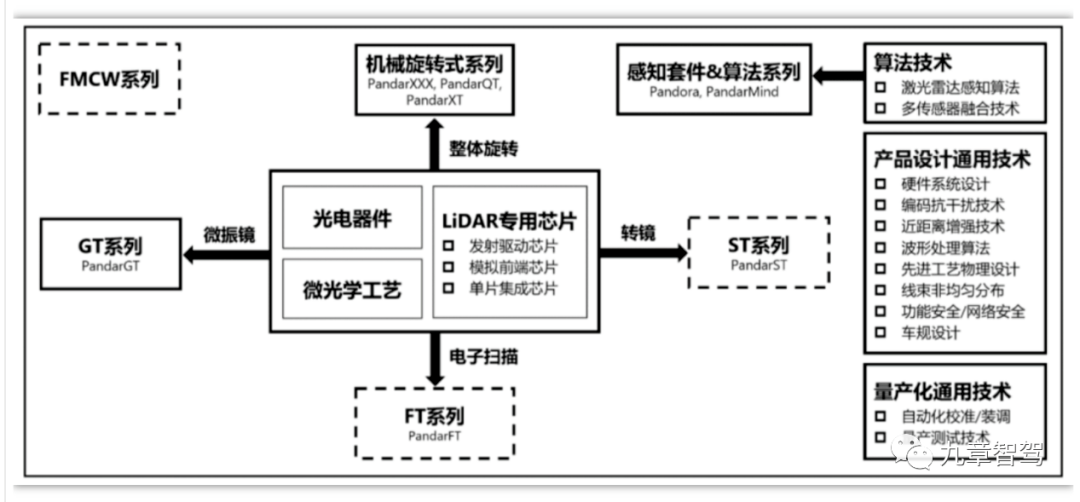
(激光雷达核心技术逻辑框图;摘自 禾赛招股书)
去年,Luminar招股书上写降成本的时候,主要强调可以把ASIC芯片、激光发射器、激光探测器的硬件成本控制到多少,却没有提扫描镜的成本。
笔者的理解是:在法雷奥已经证明转镜方案更容易过车规后,多家厂商在开发面向前装量产市场的产品时都瞄准了转镜式,这意味着,扫描方案的壁垒可能没那么高;事实上,做长探测距离、提高集成度这些,往往是要围绕着激光收发模块“做文章”。
到了纯固态的阶段,激光发射器和探测器都会被集成到芯片中,并且也不需要单独的扫描部件了,这时,激光雷达高度依赖半导体技术,很难说扫描方案占了多高的权重。
因此,在扫描方案方面,先发优势可能不明显;但在激光收发技术方面,先发优势可能会比较明显。
Q5:在激光雷达的成本结构中,占比最高的是哪块?
答:从目前激光雷达的核心组成元器件来看,芯片是关键的降本部分,包括控制芯片、ASIC芯片、激光器、波束控制机构和光电探测器。Luminar在招股书中显示,其已经通过跟供应商的协议锁定,在订单量达到一定规模的前提下激光发射器、探测器及Asic芯片,这三项的成本可控制在100美元以内。
Q6:激光雷达芯片都需要自研吗?
答案:早期,有不少厂商使用的芯片是外购的,如法国市场研究机构Yole的报告显示,高通、德州仪器、LG Innotek和理光就在为激光雷达厂商提供芯片。但由于激光雷达是一个比较新的产品,技术路线还不确定,供应商也没有成熟的方案,因此,外采的难度并不低。
况且,激光雷达早期的壁垒在光学知识,但从长期看,性能如何提升、成本怎么降,都是半导体问题。芯片就是激光雷达厂商的命脉, 激光雷达厂商没有对核心芯片的自研能力,很难在这个市场上生存。因此,Luminar从一开始就决定自研激光雷达芯片,即将在美国上市的Ouster也已自研了用在Flash激光雷达上的ASIC芯片。
Q7:随着技术的演进,激光雷达提供的功能以后有很大的变化吗?
答:基本功能不会改变,但性能会越做越好,主要体现在:探测距离会越来越长、测距精度会越来越高、分辨率会越来越高。
Q8:有一些激光雷达厂商说可提供感知算法,做数据预处理,这样,激光雷达输出的就不再是原始数据,据说这样可以把激光雷达卖出更高的价格,那么,车企是更喜欢这种附加了感知算法的方案,还是只买激光雷达硬件呢?
答:这是一个非常好的问题。Luminar和速腾聚创已明确将卖算法作为一种收入来源,禾赛招股书中也提到,融资金额中有差不多1.5亿元是要用于算法开发的。但具体更喜欢那种方案,不同的车企会有不同的选择。
小鹏、蔚来、理想这种造车新势及长城这种对自己掌握核心技术志在必得的传统车企,基本上不大可能愿意使用激光雷达厂商提供的算法;但许多一时半会儿还不能自己搞定感知算法,又急着使用激光雷达的传统车企,将不得不依赖于激光雷达厂商提供的感知算法,毕竟,消费者只在乎装激光雷达带来的体验如何,那个钱是否花得值,而不会在乎你的激光雷达算法是你自己的还是供应商的。
接下来几年,还有不少激光雷达是卖给车路协同项目,这些客户都是搞基建的公司,他们肯定没能力自己做算法的。激光雷达厂商要跟这些客户做生意,不是你愿不愿意提供算法的问题,而是你必须如此,如果不提供算法,这块市场你是啃不下来的。
当然,激光雷达的算法要比摄像头算法简单得多,因此,厂商们提供算法,是增加产品的附加值,但算法本身并不足以构成竞争壁垒。
Q9:华为的激光雷达会跟MDC捆绑吗?
答:不会捆绑的。MDC团队曾频繁跟其他激光雷达厂商接触,希望MDC的接口能跟其他厂商的激光雷达兼容,这对华为自己、其他激光雷达厂商及车企来说都是一个比较好的做法。
Q10:有华为这样能提供全栈式方案的公司在,禾赛、速腾这种初创公司的生存空间在哪里呢?
答:各家主机厂的能力体系及需求不太一样,有一些主机厂会倾向于采用华为的全栈式方案,但也有很多主机厂倾向于自研软件算法,根据算法能力及需求去选择芯片、传感器供应商。
Q11:我是来自车企战略投资部门的,车企有必要自研激光雷达吗?
答:从长期看,各车企之间自动驾驶能力的差异点,在决策算法上,而非感知环节——“正如同我们评价一个人牛不牛逼,是看他的思维牛不牛逼,而不是看他的视力牛不牛逼”(郭继舜语),而在技术成熟后,感知是会是一项标准化程度比较高的通用技术。
从技术的角度考虑,投资一项通用技术,无助于提高车企的竞争力。但如果车企的采购量足够大,而通过投资又能享受折扣价,那是另一回事。
Q12:作为车企,我们有没有必要通过参股一个激光雷达公司、占股10-15%并获得一个董事会席位,争取获得优先供货的权利?
答:也许,在几年后再看,“优先搭载”这个权利就没那么重要了。
前些年,在激光雷达由Velodyen垄断供应、产能极度紧缺的阶段,百度 福特为了优先购买Veldoyen的激光雷达而投资,但现在,激光雷达已是一个充分竞争的市场了,总共有超过100个玩家,有影响力的也达10家左右,几年之后,产能应该也起来了,“优先搭载”的必要性就不存在了吧?
况且,如果你的算法还没有牛逼到需要搭配很高级的传感器,那“优先搭载”的意义也不大吧?
来源:第一电动网
作者:九章智驾
本文地址:https://www.d1ev.com/kol/145951
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!










 京公网安备
11010502033163号
京公网安备
11010502033163号