笔者最近在收集一些测试ACC(自适应巡航)和FSRA(全速度范围自适应巡航)的结果,因为实际车上使用情况有变迁,所以先需要拿2-3家的产品历史变迁和解决方案来探究一下,根据不同的宝马车型平台换代时间,及其发布给经销商的介绍资料可以发现,自适应巡航功能(ACC)大概有4代系统。本文接上一篇文章,把ACC系统补充完毕。【从历史变迁看宝马的自适应巡航功能和实现结构(一)】
1.纯雷达(Radar)版本ACC系统(1200美金)
2.低成本视觉ACC系统(600+美金)
3.Radar和视觉融合ACC系统(1200~1900美金)
首先还是从金钱上做个系统的比较
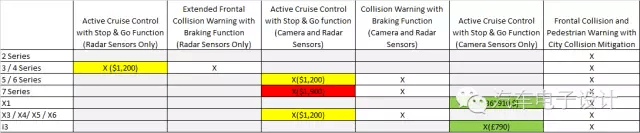
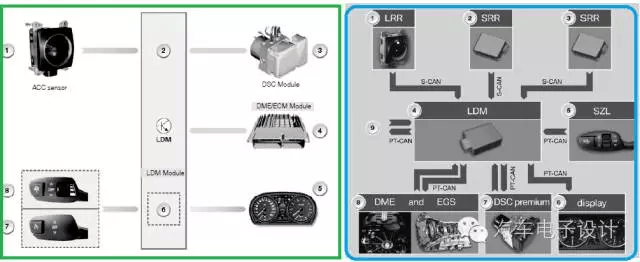
纯Radar版本ACC系统
这个系统标配是DCC,可以实现动态巡航,对于自适应巡航存在一些疑问的地方:
F01/F02/F12能做ACC Stop go,需1短2长,后续两个短距离的Radar给视觉代替了,变成融合方法了;基于3系/4系的,以前是单77Ghz雷达的为主,第二代Active Cruise的平台。故而信息不是特别明朗。
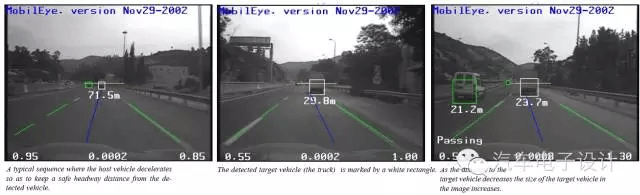
低成本视觉ACC系统
低成本视觉ACC系统从原来的i3开始扩展的X1上,用的是单目的低成本方案,600美金可以做这个功能,里面涉及的内容模块化,下一步可以扩展到更多车型上面。
视觉用来鉴别车,还是非常清楚的,还可以跟车道线结合,在之前的ACC里面区分车辆好大的困难就容易解决。
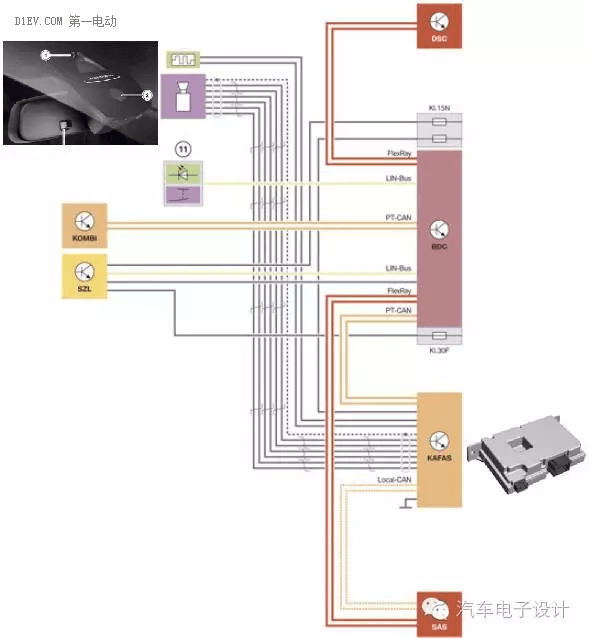
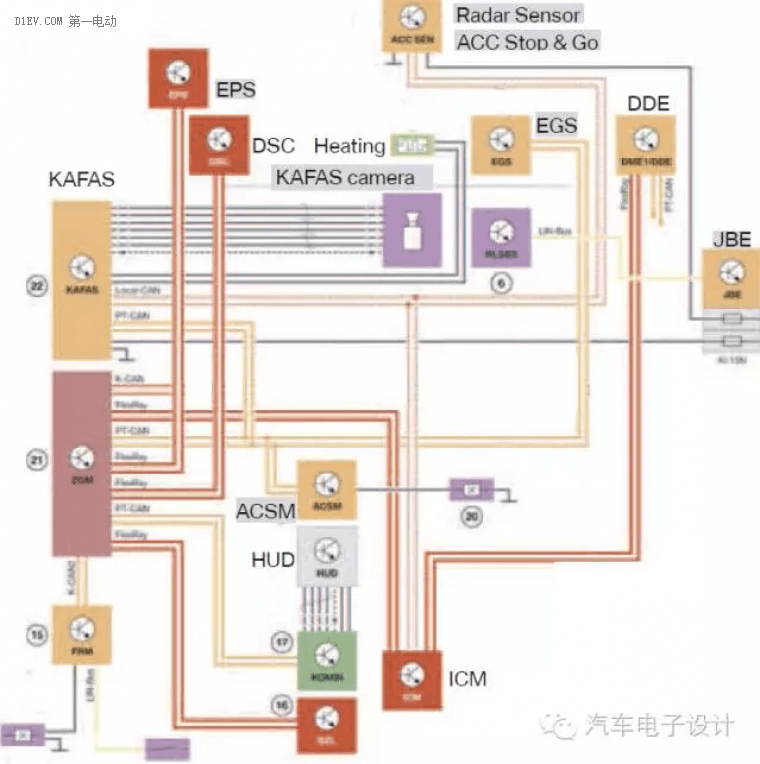
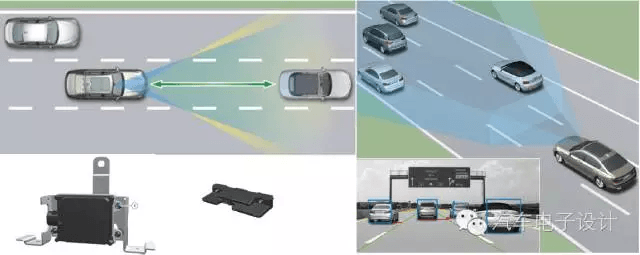
Radar和视觉融合ACC系统
1.单目融合
这个是在5/6系和X系列车型上面,使用单目与Radar融合的产物。
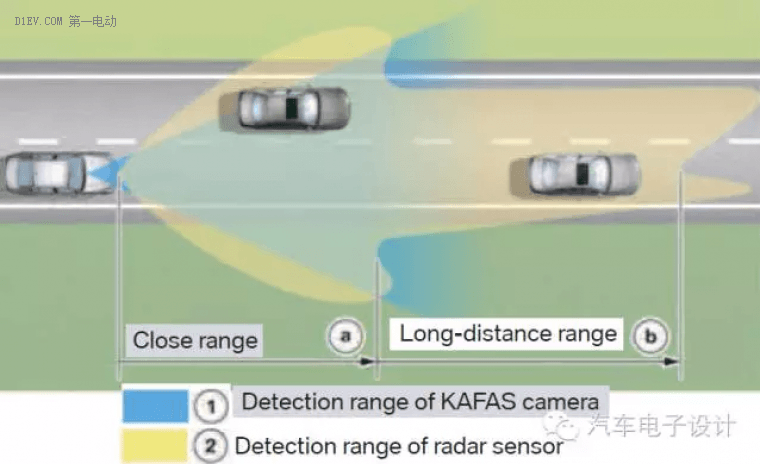
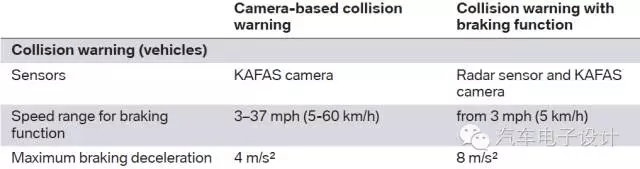
这里倒是罗列了有没有雷达的区别,主要体现在减速范围上,在这个功能里面,视觉起到的作用其实挺大的,可以很好的区分前方车辆的实际情况,距离控制本身还是以雷达为主。
备注:这里很难区分出视觉ACC和视觉+RadarACC里面的性能区别。
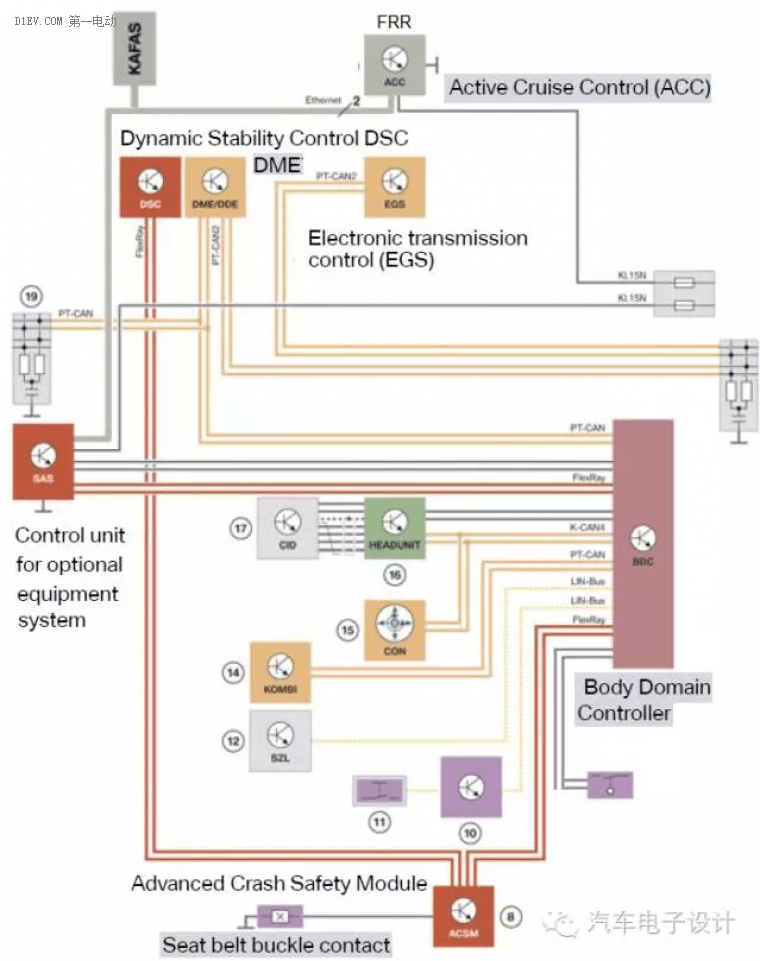
2.双目融合
由于双目的系统是镜头、处理器封装在一起,通过以太网与FRR的雷达还有SAS进行连接,主体的算法可以在不同情况下做不同的处理。
这明确提出可以在多车道高速公路、普通公路以及城市主干道和环道 上进行,检测物体里面也包含了摩托车。
没有产品的性能测试对比,其实这些结构都没有太大的意义,也无从揣测其设计意图了。以后跑车测试的时候,带着一套独立的视觉记录+测距记录的东西可能可以有效对比已有系统和未来系统在感知和判断之间的差别。
小结:
一方面,要把这些单元的参数规格化,一方面是通过场景的实测数据对比实际性能。
来源:第一电动网
作者:朱玉龙
本文地址:https://www.d1ev.com/kol/46299
本文由第一电动网大牛说作者撰写,他们为本文的真实性和中立性负责,观点仅代表个人,不代表第一电动网。本文版权归原创作者和第一电动网(www.d1ev.com)所有,如需转载需得到双方授权,同时务必注明来源和作者。
欢迎加入第一电动网大牛说作者,注册会员登录后即可在线投稿,请在会员资料留下QQ、手机、邮箱等联系方式,便于我们在第一时间与您沟通稿件,如有问题请发送邮件至 content@d1ev.com。
文中图片源自互联网,如有侵权请联系admin#d1ev.com(#替换成@)删除。




先估价再买车,买的放心开的安心
您的询价信息
已经成功提交我们稍后会联系您进行报价!








 京公网安备
11010502033163号
京公网安备
11010502033163号